'14水中ロボットコンベンションin JAMSTEC ”水中ロボコンin JAMSTEC'14” 公式サイト  |
'14水中ロボットコンベンションin JAMSTEC ”水中ロボコンin JAMSTEC'14” 公式サイト |
結果発表
テレビ神奈川、9月5日(金)21:30からのニュースでオンエア予定
大会参加者・見学者へのご案内
- Golden Crab賞を設置
クリックで全体表示対象:全チーム(AUV 11, フリー11, 高校5 計27チーム) 獲得要件:自分の演技時間中に、プール底に設置されたカニにロボットがタッチすること。
タッチの判定はダイバーによる。賞品:カニに関する豪華賞品。
ただし配分については以下を考慮して重み付けをする。
①自律制御でタッチ
②タッチだけでなく捕獲してくる
③午前の部で成功
④高校生チーム等
2014.8.23 会場配置図を公開。 2014.8.19 高校競技部門公式ガイドブックを公開。 2014.8.4 参加人数が上限に達したため、競技参加及び見学の申込みを締め切りました。 2014.5.26 14水中ロボットコンベンション in JAMSTEC 公式ガイドブック/付録A/付録B(一般競技部門、暫定版)を公開
2014年8月26日更新
●開催目的- 本イベントの目的は、自作の水中ロボットによる競技会やプレゼンテーションを通じて参加者の交流の輪を広げるともに、工学的知識・技術を駆使して現実的な課題に挑む機会を提供することです。そして、アウトリーチ活動の一環として、子供たちや社会に向けて水中ロボット研究の楽しさと重要性をアピールすることです。
- ●日時
- 2014年8月30日(土) 12:30 - 17:30(競技コースの公開、ロボットの調整、プレゼンテーション)
2014年8月31日(日) 10:00 - 16:30(水中競技、構内見学、表彰式)
- ●会場:独立行政法人 海洋研究開発機構(JAMSTEC)横須賀本部
- 潜水訓練ダイビングプール(21 m×21 m、水深:3.3m/1.5 m)及び本館大講義室、セミナー室
- ●参加条件(事前登録必須。登録受付は締め切っています)
(参加費)- 参加費無料。ただし機材搬送費、交通費、滞在費等は自己負担。
- (参加区分)
一般競技部門
(1日目及び2日目)ロボット持参。1日目の調整・プレゼンテーションと2日目の水中競技(課題コース又はフリー演技)の双方へ参加する。採点・表彰の対象となる。
今回はAUVとフリースタイルの2部門制となります。ROVはフリースタイル部門へご登録ください。
競技ルール:14水中ロボットコンベンション in JAMSTEC 公式ガイドブック/付録A/付録B(2014.5.26公開)
※本ガイドブックは暫定版です。情報は逐次更新されますので、常に最新版を参照ください。高校競技部門
(1日目及び2日目)高校生等を対象とし、実行委員会が提供した水中ロボット用パーツを組立・調整〜操縦練習〜水中競技を行う。7チームまで。自作ロボットを持参するチームは一般競技部門で参加のこと。
競技ルール:高校競技部門公式ガイドブック一般デモ参加今回は参加チーム数増大のためプールサイドに余裕がなく、2日目のみの一般デモ参加は取りやめとなりましたので、ご了承願います。 見学
(2日目)見学のみ。ただし本イベントでは一般・子供向けの体験操縦はありません。1日目も見学希望の方は申し込み時にその旨明記願います。 - ●参加チーム(順次追加します)
(一般競技部門)
エントリー番号 所属
チーム名ロボット名 説明 画像 フリー 岩手大学三好研究室
チーム FANFAN 長さ0.45m、6.1kg, 有線
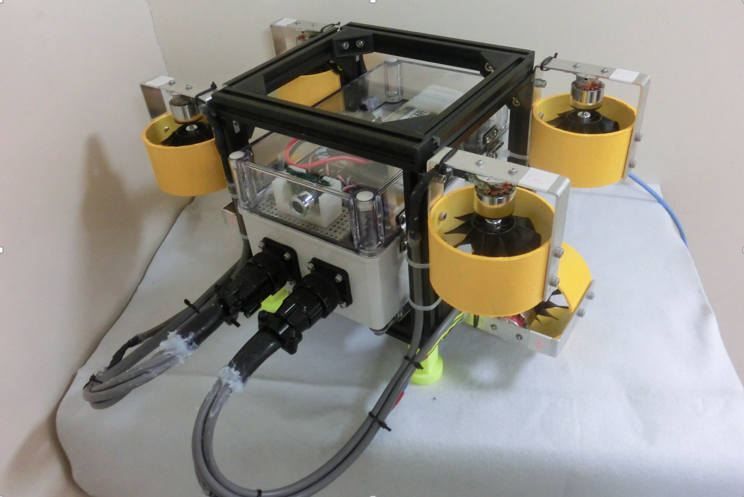
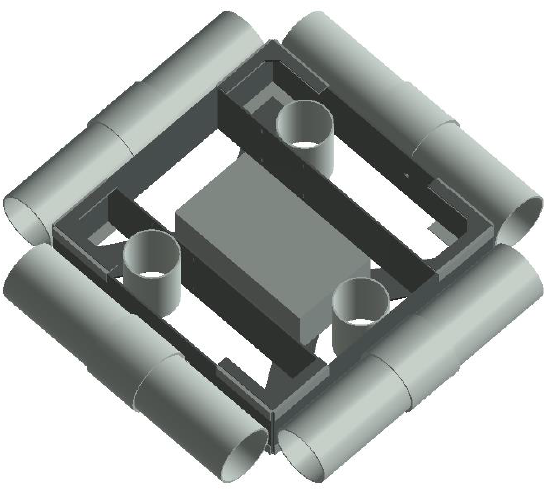
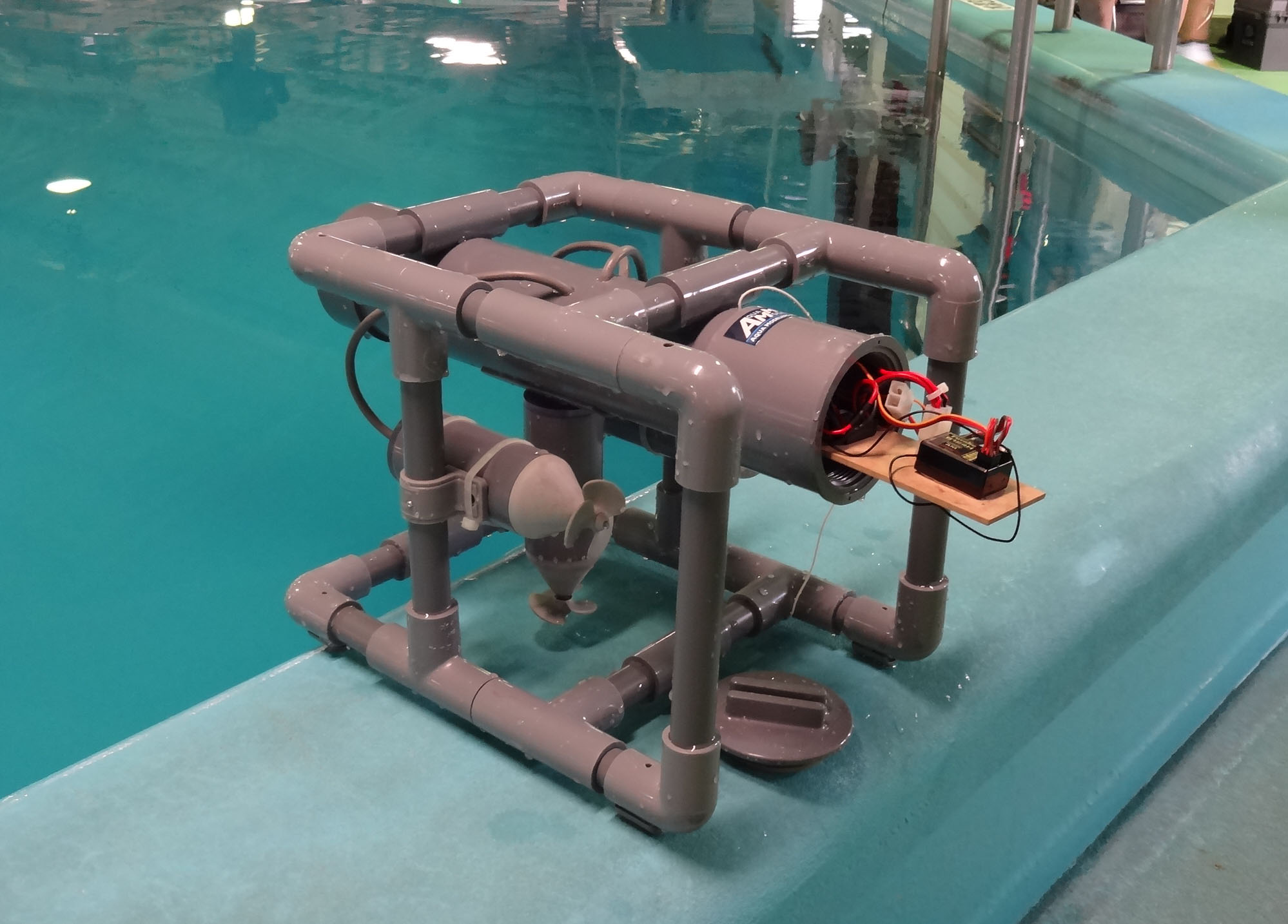
FANは,1辺200[mm]の立方体のアルミフレームで構成されたフレームに,6個の推進器及び,制御器を封入した防水容器をフレームに取り付けたオープンフレーム構造のROVです.ポスターpdf フリー 岩手大学三好研究室
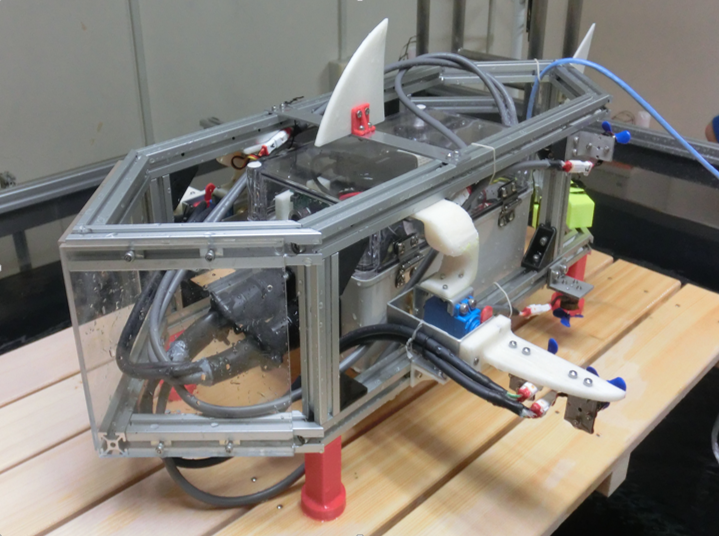
チーム さっしーさっしー 長さ0.7m、7.4kg、有線
サメをモデルにしたROV方式の水中ロボットです.モーターを取り付けたヒレの角度を制御し,運動方向の前後,上下の切り替えやロール運動などを可能としています.ポスターpdf フリー 千葉工業大学
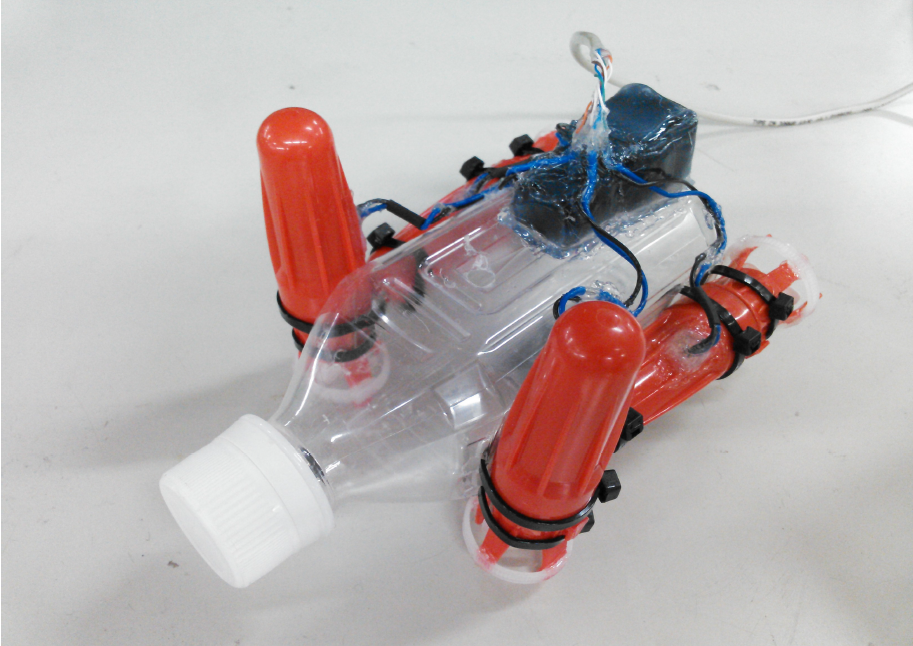
reRoGOLIATH Ⅰ 長さ0.18m、0.16kg、有線
ペットボトルを用いた小型ROV。ローコストで製作が可能。複数のスラスターによる力の合成により推進方向を決定する。ポスターpdf フリー 東京工業大学附属科学技術高校
うみがめロボット美らがめ 長さ0.47m、4.3kg、ヒレ推進
水棲生物をモデルとした、水中探査ロボットの可能性の探求することを目的とし、羽ばたき機構で前足を動かすことにより推力を得、後ろ足の角度による旋回をおこなう。ポスターpdf フリー 東京海洋大学
ロボット研究会Beyond Middle Island 長さ0.40m、4.7 kg、ROV
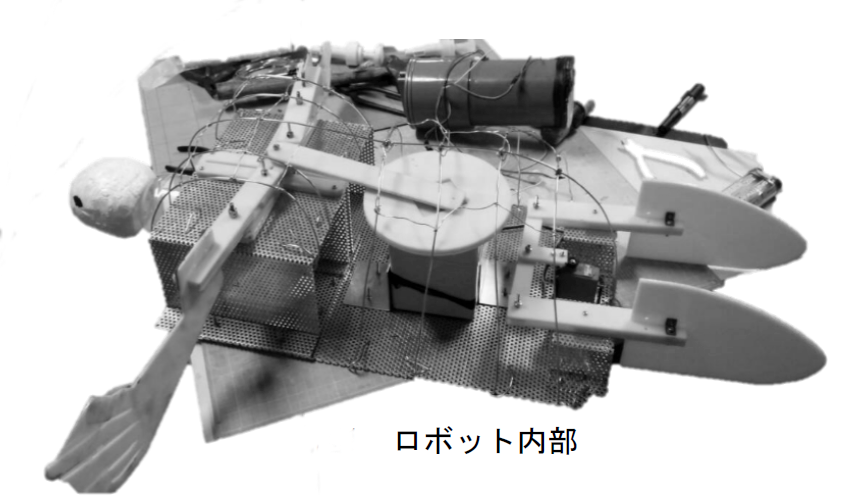
船舶部と潜水艦部の二部から構成されており船舶部のウィンチによって潜水艦部に接続されているケーブルを伸縮させることが出来るROVです。ポスターpdf フリー 東京工業大学附属科学技術高校
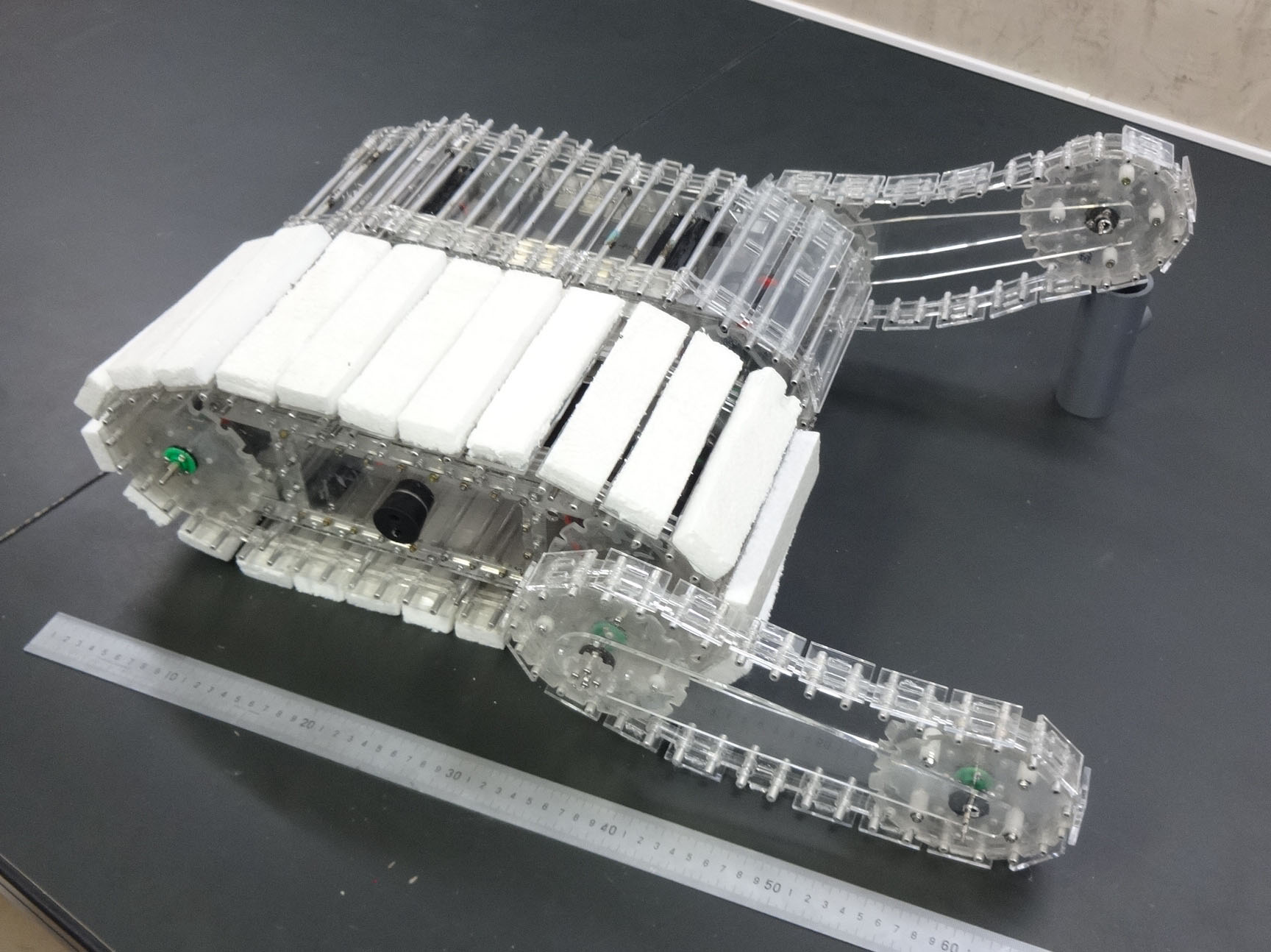
MT4マルレラ 長さ1m、6kg、水陸両用
クローラーを自作し、浮きを取り付けることで、クローラーでありながら、水上走行を可能にしたロボットです。陸上の走行も可能ですので、水上陸上両方で走行することができます。災害時などに要救助者などを捜索することを目的としています。ポスターpdf フリー 九州職業能力開発大学校
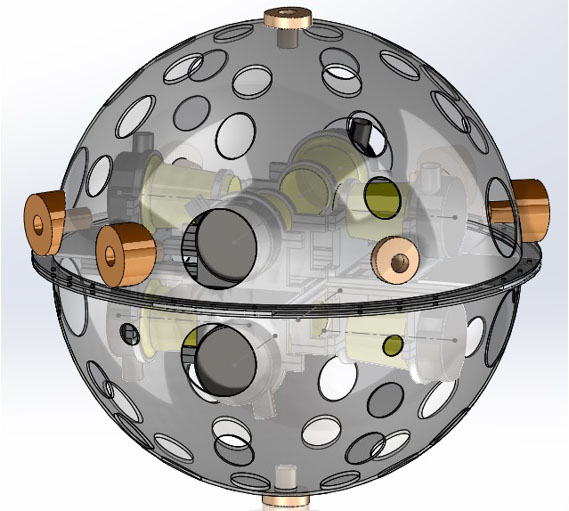
KPC-ROV2014HAT 長さ0.65m、25kg、有線
今年度のROVは、昨年度のデザインを一新し抵抗を最小限に抑えるため球体にした。行動範囲も上昇・下降・前進・後進に加え、斜め方向にも移動ができる全方向型に仕上げた。ポスターpdf フリー 慶應義塾湘南藤沢中高等部
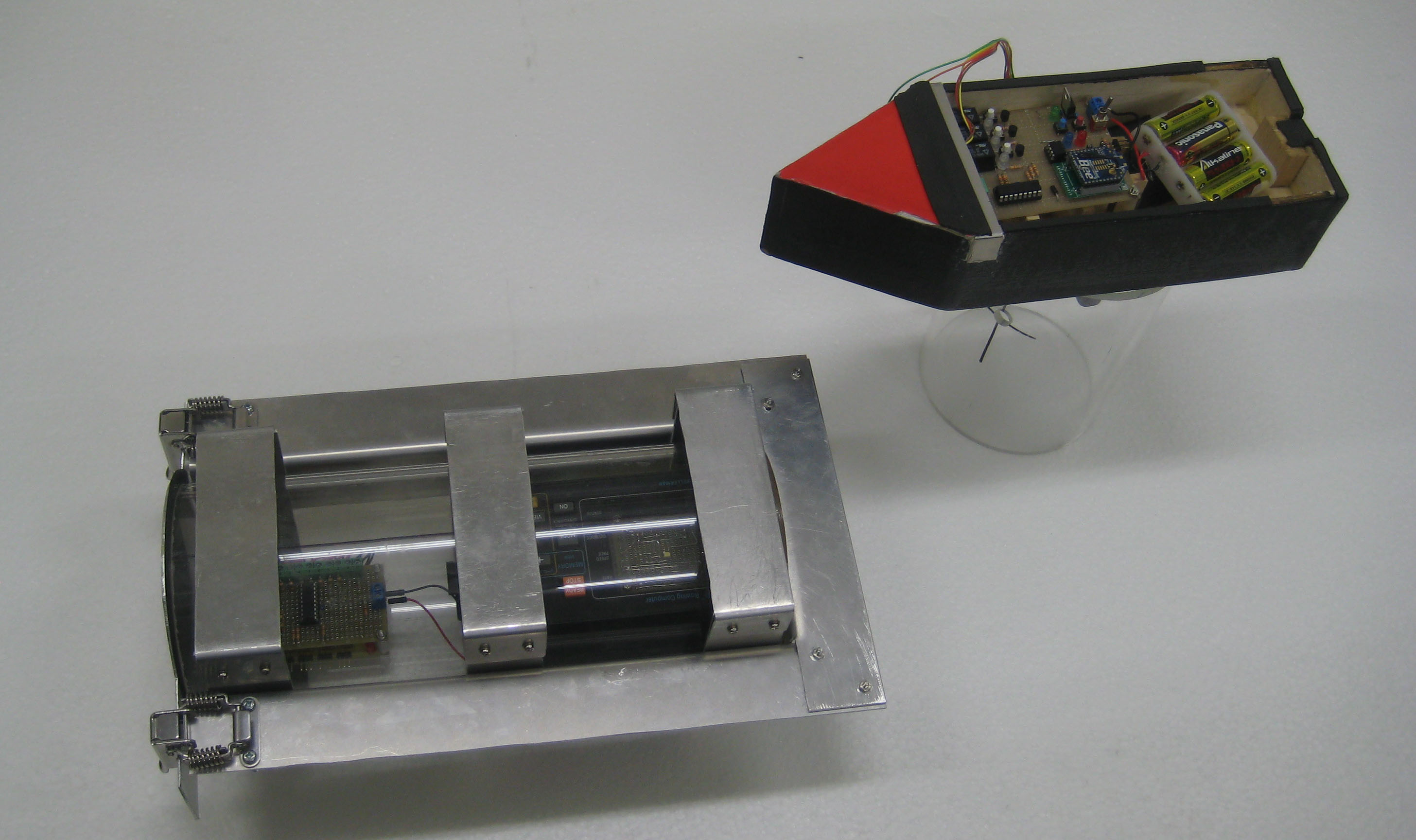
電子工学研究会二代目OYG-YKT 長さ0.6m、3kg程度、有線
自分たちは公害の発生している人の入りづらい湖の、沿岸近くの生態系を観測することを目的とした機体の開発を行っています。この機体は、浅瀬での活動を想定しているので地面に乗り上げないよう、かつ小回りの効く形にする必要と、水中で定点観測が出来るよう、波による影響を受けづらい形状にする必要があると考えました。そこで、カメラやセンサ等を搭載したうえで、可能な限り機体を薄くし、周囲の流れの影響を低減する形状を目指しています。ポスターpdf フリー 横浜国立大学
横浜OCEANSPACEOS14 長さ0.3m、2.5kg、有線
3基のスラスターによる低コストかつ単純な構造で水中を動きまわることを目標として作成した。 フリー (有)杉浦機械設計事務所
チームSMDSMDパーソナルROV 長さ1m、?kg、ラジコン
水中のイワナやヤマメ、ニジマスはどのように暮らしているのだろうか。パーソナルROVとはスマートフォンのように機能追加が出来る身近な水中の「探検ツール」という新たな提案です。身近な湖沼や磯溜まりを容易に調査し冒険の世界に没入します。 フリー
TRYBOTSもるペン! 長さ0.6m、3.0kg、ヒレ推進
ペンギンを模したロボットです。去年は東工大附属高校の所属として大会に参加しました。ポスターpdf AUV 東京海洋大学
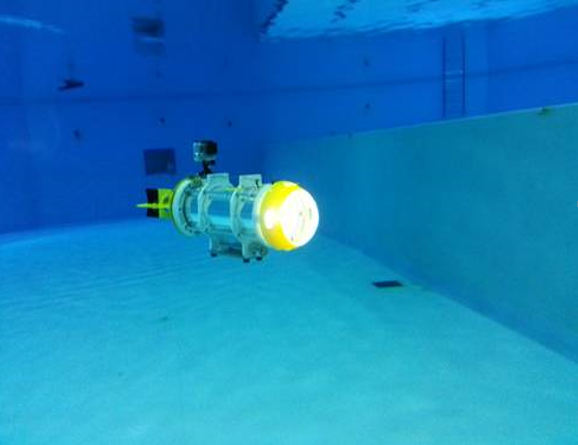
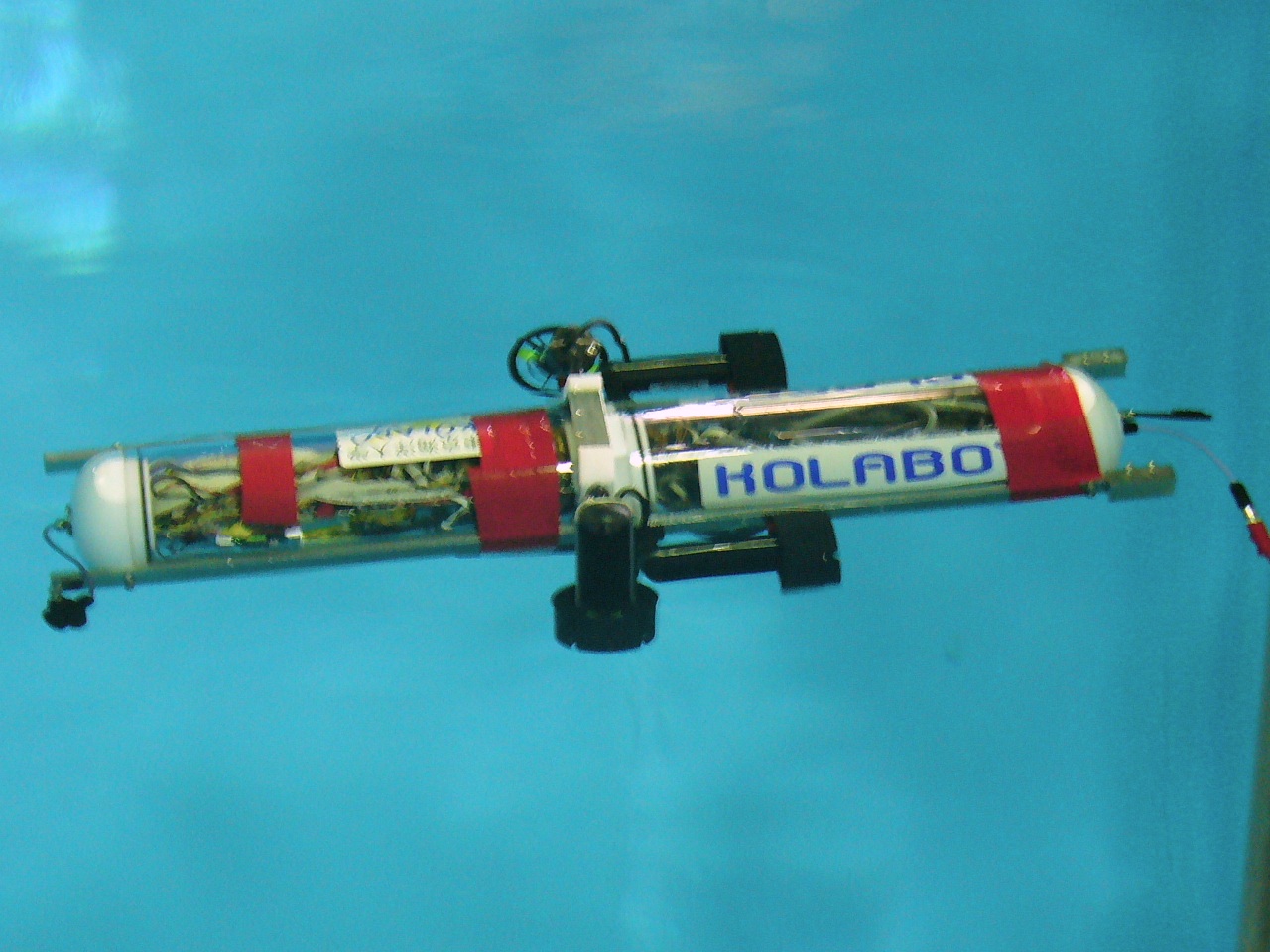
TEAM KOLABOTSUPER KOLABOT 長さ0.95m、重さ未定、自律型
小型テストベッドAUV「SUPER KOLABOT」は東京海洋大学海洋工学部近藤研究室で開発されたKOLABOTを改良したものです。今年は画像処理を中心として動作し、ハード、ソフトともに一新しました。 AUV 東京大学
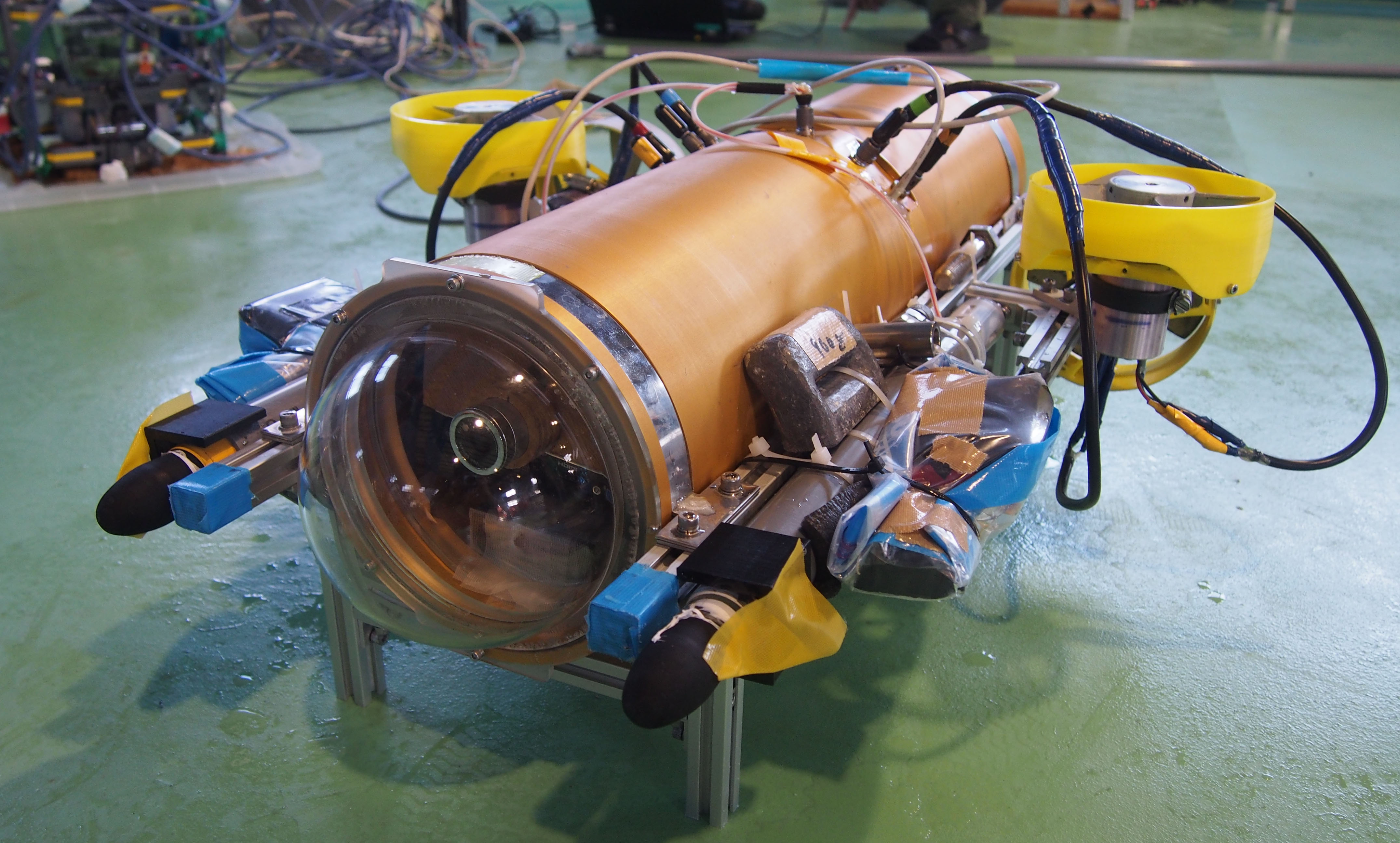
チーム東大Yebis-URA 長さ0.75m、19kg、自律型
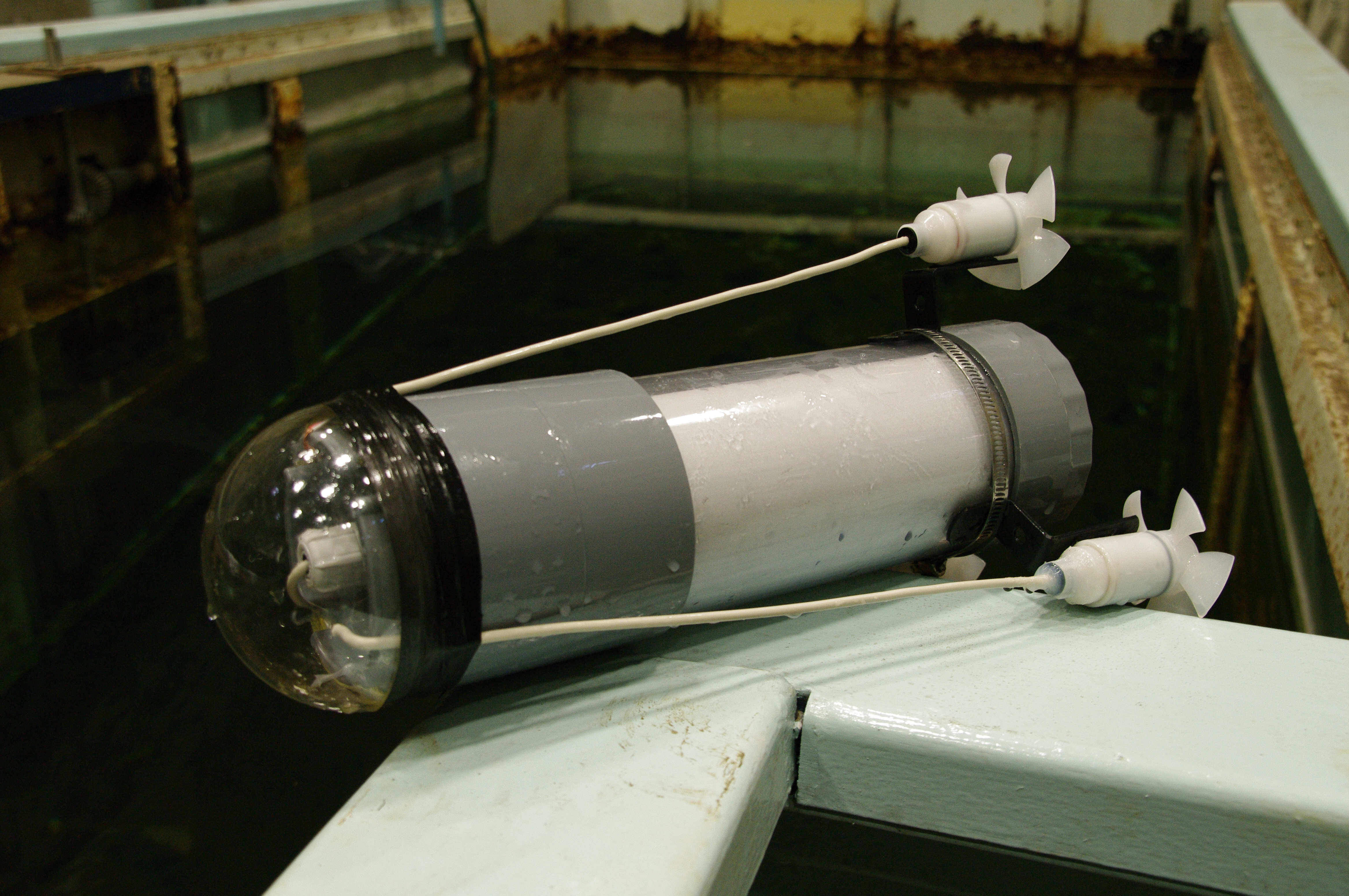
オレンジ色の筒状のボディにwebカメラ・PC・arduino・バッテリー・スラスターを搭載しています。スラスターは前進方向に2基、深度方向に2基搭載。ポスターpdf AUV 九州職業能力開発大学校
KPC_A逆戟(さかまた) 長さ0.8m、15kg、自律型
2つのUSBカメラとセンサ(超音波センサ、圧力センサ、3軸地磁気加速度センサ)からのデータをもとに、ブラシレスモータ(垂直方向×2、水平方向×2)を制御して航行を行う。また、子機を2機搭載し、子機によるブイタッチを実現したいと考えている。さらに、新規のCPUを搭載することで、処理速度が格段に向上している。ポスターpdf AUV 九州職業能力開発大学校
KPC_BOrca 長さ0.8m、16kg、自律型
九州能開大のAUVのプロジェクトも今年で6年目に入り海洋での航行も考え、高出力のスラスタに変更した。スラスタの変更だけでなくソフト面でも大きく変更をした。ポスターpdf AUV 長崎総合科学大学
あばまるNiASSea Bird Reborn
長さ0.6m、重さ7kg学生が企画したプロジェクトを大学が支援するNiASプロジェクト2年目の挑戦です.昨年は画像処理やモータ制御などソフトウェア開発を中心に,今年はハードウェアの強化に取り組みました.耐圧容器は九州工業大学石井研究室で開発されたSea Birdを流用しています.2014年春に迎えた本学の改組のフレーズ"Reborn"にちなみ,Sea Bird Rebornと命名されました.ポスターpdf AUV 国立台湾大学
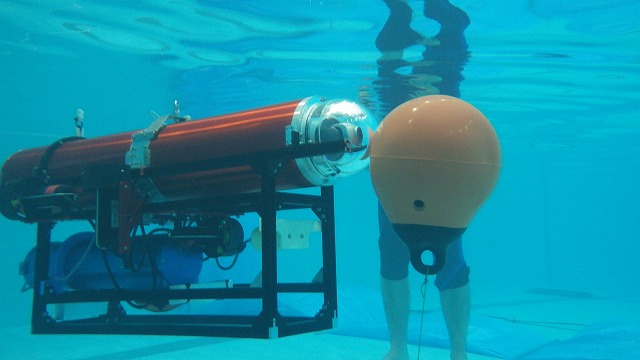
UVLABI.F.(Iron Fish)
長さ0.8m、重さ19.5kg、ヒレ推進The Iron Fish (I.F.) is designed as an live exhibition biomimetic robots at the National Museum of Marine Science & Technology, Keelung, Taiwan. Figure(a) shows the appearance of I.F, a 90-cm-long vehicle with a rotatable thruster and elevators on both sides. It is equipped with two cameras, a manometer, an electronic compass, an industrial computer, a wireless LAN. ポスターpdf AUV 早稲田大学本庄高等学院/
SSH部水中ロボット研究班
WAQUAWAQUA-kun II 長さ0.6m、重さ未定、AUV
今回のWAQUAくんは昨年のものに比べ、大きく動作性能や安定性が向上した。スラスターを3つから5つにすることにより、より細かく多様な動きに対応できるようにした。また、左右のスラスターの回転数の誤差を補正するためのシステムや画像認識の精度を向上させるためにハイパワーLEDも搭載した。ポスターpdf AUV 西日本工業大学
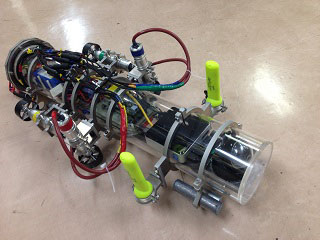
SLAB幸村 長さ0.5m、5kg、自律型
昨年度の卒業研究で製作したAUVを大幅に改良しての参加になります.コスト削減のため,スラスタや深度センサも自作しています.ポスターpdf AUV 慶應義塾大学
慶應水中開拓チームMark-5 長さ0.9m, 19kg, AUV
探査を目的としたロボットは探査環境内におけるシステムの最適化を行うことが最も重要です.しかし,それと引き換えに輸送コストの悪化や,展開に時間を要することもありえます.そこで,本機は小型水中ロボットの構造に着目して,輸送や揚収に新たな手法を提案することを目的として開発を行いました.説明 AUV 北九州工業高等専門学校
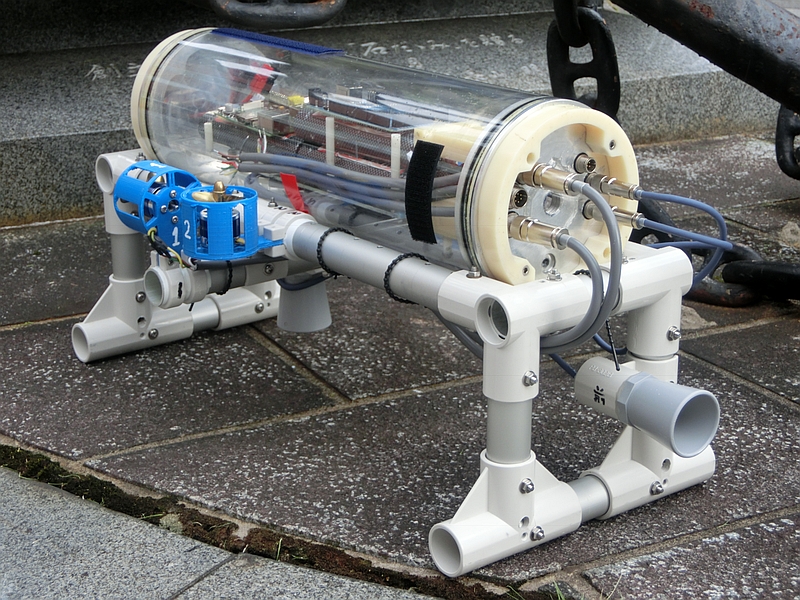
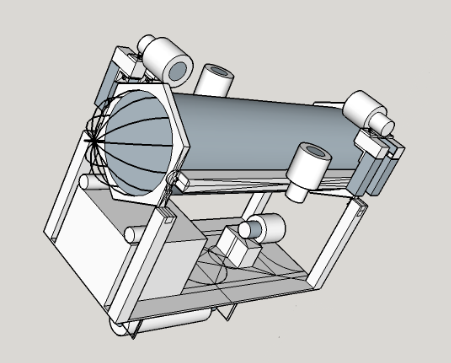
NIT,Kitakyushu CollegeOHA (Omunidirectional Hovering AUV) 長さ0.78m、10kg、自律型
近年、クアッドロータ型ヘリコプタに代表されるようなラジコンヘリが注目を集めています.私たちはヘリコプタのように自由に水中を運動できるロボットの開発をめざしました.ロボットの名もOmunidirectional Hoverring AUVの頭文字からOHA(オーハ)としました.ポスターpdf AUV 九州工業大学大学院
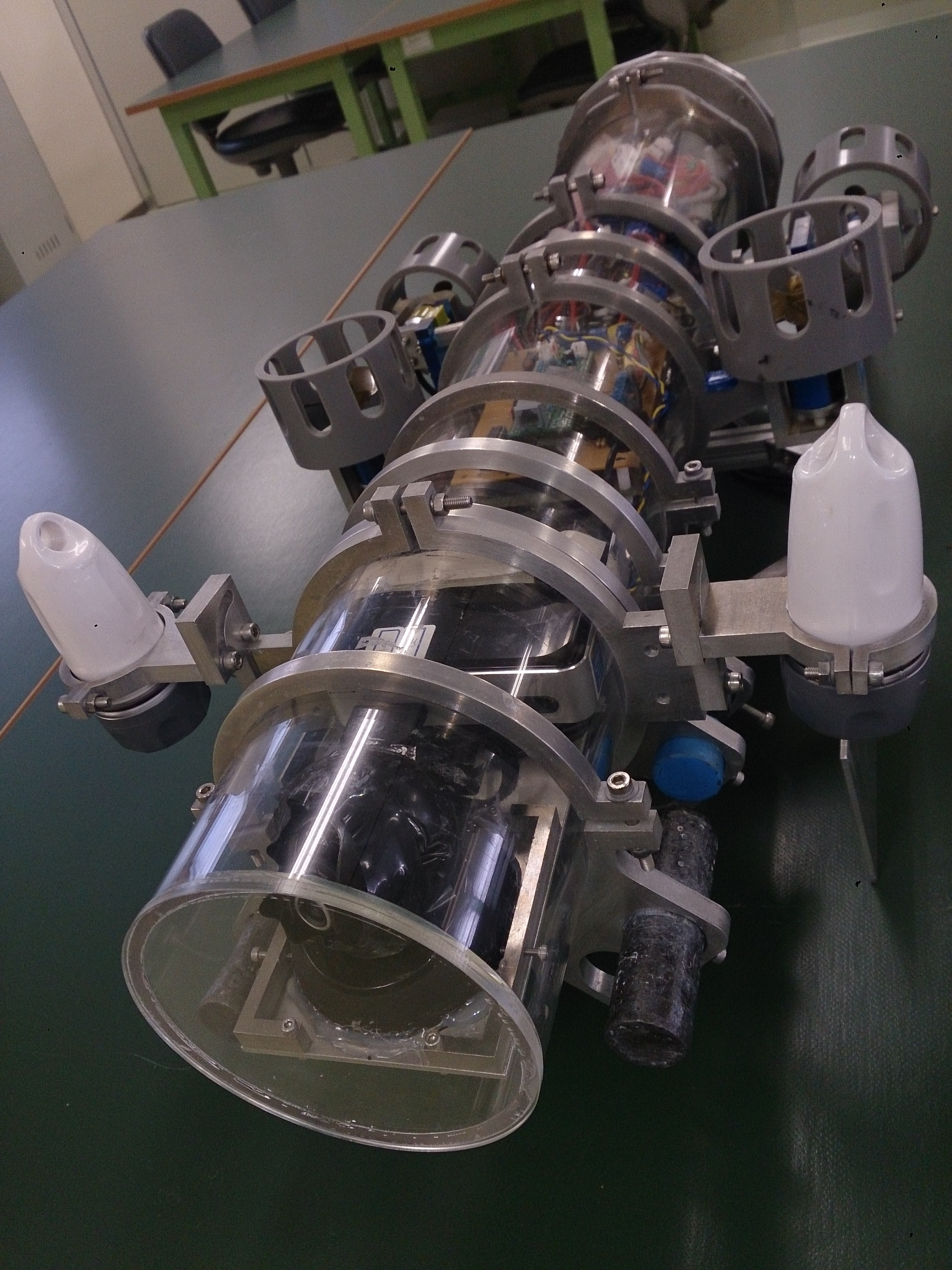
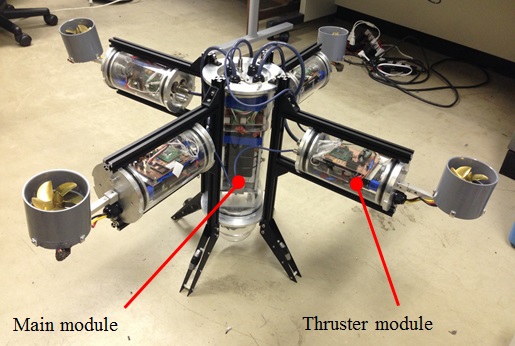
TEAM AILABDaryaBird 長さ1.0m、35kg、自律型
主な開発コンセプトは以下の通りである.(i)1〜2 人による揚収が可能(ii) カメラ映像による広い視覚範囲の確保(iii) 高い保守性や管理性を有す.これらのコンセプトに基づき,DaryaBird は(i)全長1[m],幅0.4[m],高さ0.45[m],重量35[kg] と小型軽量,(ii)前方360 度の視界を確保するパンチルト可能なネットワークカメラを装備,(iii) 中央に集約したコネクタ・ケーブルによる耐圧容器開閉時の内部配線の高メンテナンス性,という特徴を持つ.ポスターpdf 協力 水中ビークルフリーミーティング
アクアモデラーズ中・高校生向けROV用パーツの提案
市販品で作るROV用スラスター、有線コントロール用回路、ROV搭載用簡易カメラを紹介。ポスターpdf/プレゼンpdf (高校競技部門)
01 高校名 チーム名 ロボット名 01 神奈川県立海洋科学高等学校 ムウ・ラ・フラガ メビウス零(ゼロ) 02 東京工業大学付属科学技術高等学校A 冷奴 ゴンザレス 02 東京工業大学付属科学技術高等学校B にがりα Δ(デルタ)豆腐ちゃん 03 慶応義塾湘南藤沢中高等部 海洋カネダーズ 電光犬-Ⅱ 03 山手学院中学校・高等学校 みらい Deep
潜水訓練プール内の状況
- (持ち込み水中ロボットの条件)
形式 自由(自作・市販問わず。水中に潜れなくても可) 制御方式 自由(自律、遠隔制御のどちらでも可) 寸法制限 全長2.0m 以内、全幅0.8m以内、全高1.0m以内(完成時) 重量制限 空中重量200kg以下(完成時)
- 潜水訓練プール棟の2階までホイストで吊り上げる場合の開口部寸法、吊り上げしろ等については、こちらを参照願います。- テザーケーブルで電力を供給するものについては事前に相談のこと(100V-20Aまで。それを越える場合は発電機を持参のこと)
- 市販のラジコン用プロポを使用する場合は、陸上用ラジコン(模型ボート、ラジコンカー等)に割り当てられた周波数に限るものとし、模型飛行機用の周波数は使用しないこと。
- ●注意事項:
- (来構方法)
- ・自動車による搬入が可能(当日・前日とも)。事前に申し出てください。(道路マップ)
・電車・徒歩の方:当日は直行の路線バスが運休のため、追浜駅からタクシーまたは京急バス「追浜車庫」から徒歩2km(来構方法)。2日目のみシャトルバスが朝夕2便ずつ運航します(朝は追浜駅8:15、9:20 発、帰りは機構16:40、17:40発)。
・運送業者・宅配便業者による本人立会いなしの事前搬入については事務局にご相談ください。- (事前調整)
- 毎月1回のJAMSTEC潜水訓練プールでの水中ビークルフリーミーティングで事前調整することができます(学生、先生及び見学者は参加費無料)。
水中ビークルフリーミーティング公式サイトをよくお読みのうえ事前申し込み願います。- (その他)
- ・当日は、水中ロボコン会場以外のJAMSTECの施設は公開されていません(2日目15:00より一部施設について見学会を予定)
・当日は、会場の徒歩圏内に飲食店・コンビニはありません。ソフトドリングの自販機はあります。持ち込んだ飲食物は事務局指定の場所で飲食願います。
・周辺の宿泊情報については仮登録いただいたチームにお知らせします。
- ●主催等(予定)
共 催 NPO法人日本水中ロボネット、(独)海洋研究開発機構、(社)日本船舶海洋工学会、IEEE/OES日本支部、MTS日本支部、テクノオーシャン・ネットワーク、Office of Naval Research Global (ONRG) 後 援 東京大学生産技術研究所海洋探査システム連携研究センター、東京大学海洋アライアンス、九州工業大学社会ロボット具現化センター 協 力 アクアモデラーズ・ミーティング、松山工業株式会社、日本水産株式会社(ニッスイ) 実行組織 水中ロボコンinJAMSTEC実行委員会(日本水中ロボネット)及びJAMSTEC