'13水中ロボットコンベンションin JAMSTEC ”水中ロボコンin JAMSTEC'13” 公式サイト  |
'13水中ロボットコンベンションin JAMSTEC ”水中ロボコンin JAMSTEC'13” 公式サイト |
結果発表!
2013.8.8 :一般競技時間割を公開しました。 2013.8.8 :競技参加、見学ともに、収容可能人数を超えたため、締め切りました 2013.5.29 :一般競技部門の競技ルールを更新
(ルールや安全上の注意に修正がありましたので、必ずご確認ください。)13水中ロボットコンベンション in JAMSTEC 公式ガイドブック(2013.7.19更新) 2013.6.22 :高校競技部門 募集要項を公開。
2013年8月10日更新
●開催目的- 本イベントの目的は、自作の水中ロボットによる競技会やプレゼンテーションを通じて参加者の交流の輪を広げるともに、工学的知識・技術を駆使して現実的な課題に挑む機会を提供することです。そして、アウトリーチ活動の一環として、子供たちや社会に向けて水中ロボット研究の楽しさと重要性をアピールすることです。
- ●日時
- 2013年8月31日(土) 12:30 - 17:30(競技コースの公開、ロボットの調整、プレゼンテーション)
2013年9月1日(日) 10:00 - 16:30(水中競技、構内見学、表彰式)
- ●会場:独立行政法人 海洋研究開発機構(JAMSTEC)横須賀本部
- 潜水訓練ダイビングプール(21 m×21 m、水深:3.3m/1.5 m)及び本館大講義室、セミナー室
- ●応募方法(競技参加、デモ参加、見学ともに締め切りました。)
- ・見学を含む全ての参加者は事前登録が必要です。
- ●注意事項:
- (来構方法)
- ・自動車による搬入が可能(当日・前日とも)。事前に申し出てください。(道路マップ)
・電車・徒歩の方:当日は直行の路線バスが運休のため、追浜駅からタクシーまたは京急バス「追浜車庫」から徒歩2km(来構方法)。2日目のみシャトルバスが朝夕2便ずつ運航します(朝は追浜駅8:15、9:20 発、帰りは機構16:40、17:40発)。
・運送業者・宅配便業者による本人立会いなしの事前搬入については事務局にご相談ください。
- (その他)
- ・当日は、水中ロボコン会場以外のJAMSTECの施設は公開されていません(2日目15:00より一部施設について見学会を予定)
・当日は、会場の徒歩圏内に飲食店・コンビニはありません。ソフトドリングの自販機はあります。持ち込んだ飲食物は事務局指定の場所で飲食願います。
・周辺の宿泊情報については仮登録いただいたチームにお知らせします。
- ●参加チーム
(高校競技部門)
エントリー番号 所属
チーム名ロボット名 説明 画像 ROV1 日本工業大学
チーム・アミアンアルゴノート 長さ0.4 m、1.48kg
安価で高性能な、大会のスタンダードになりうる機体を目指します。 ROV2 日本工業大学
Team Delphinus高機動海中ロボットDelphinus 2 長さ0.8m、19.9kg
Delphinus2は、高機動ROV/AUVのプロトタイプです。通常のAUV より素早い動きで、他の機体を圧倒させ効率的な運用を目指して開発しています。 ROV3 慶應義塾大学
水中開拓チーム教学用ROV Mk-3 長さ0.4m, 2.48kg
水中ロボットは,3次元空間で動作でき,その動作に関わる多様な力を考察することができるため,工学の学習のために非常に有効な教材といえます.しかし,普通科高校では工作環境が限られるため実際に制作することは難しいという現状があります.そこで,この水中ロボットMk-3は特殊な工具を用いずに気軽に制作,改造して実験を行える水中ロボットを目標として開発を行なっています.資料pdf ROV4 慶應義塾湘南藤沢中・高等部
慶應電工研OYG-YKT
(およぐ諭吉先生!)
長さ0.4m, 4.24kg自分たちは公害の発生している人の入りづらい湖の、沿岸近くの生態系を観測することを目的とした機体の開発を行なっています。この機体は、浅瀬での活動を想定しているので地面に乗り上げないよう、かつ小回りの効く形にする必要と、水中で定点観測が出来るよう、波による影響を受けづらい形状にする必要があると考えました。そこで、カメラやセンサ等を搭載したうえで、可能な限り機体を薄くし、周囲の流れの影響を低減する形状を目指しています。資料pdf ROV5 九州職業能力開発大学校
KPC-ROVKPC-ROV2013 長さ0.4m、15.3kg
推進機をバスポンプにすることで制御を簡単にした機体です。資料pdf ROV6 日本大学
Team 桜菜SAKURANA2号機 長さ0.5m、9.52kg、無線操縦
私たちの水中ロボットは現在製作している1号機のテスト機として製作中です.2号機は自律させるためのデータ取得のための機体で,様々なセンサーを搭載しています.資料pdf ROV7 (有)杉浦機械設計事務所
チームSMDSMDネプチューンROV 長さ0.8m、7.44kg、ラジコン
サンダータイガーのネプチューンを小改造しソニーのアクションカムを搭載しています。説明pdf AUV1 九州工業大学
TEAM AILABDaryaBird 長さ1.0m、33kg、自律型
小型のシステムであり,簡単に運搬可能.パンチルト可能なカメラを搭載しており,環境調査や防波堤等の保守・点検に用いる事が可能.AUV(自律行動)/ROV(人による操作)を変更可能であり,幅広いミッションに対応可能. 画像情報に基づくナビゲーション(ライントラッキング,ブイドッキング,自己位置同定)やタンカー等の大型艇を想定した船底掃除(反力制御,自己位置同定,経路計画)といった用途への応用を想定している.資料pdf AUV2 九州職業能力開発大学校
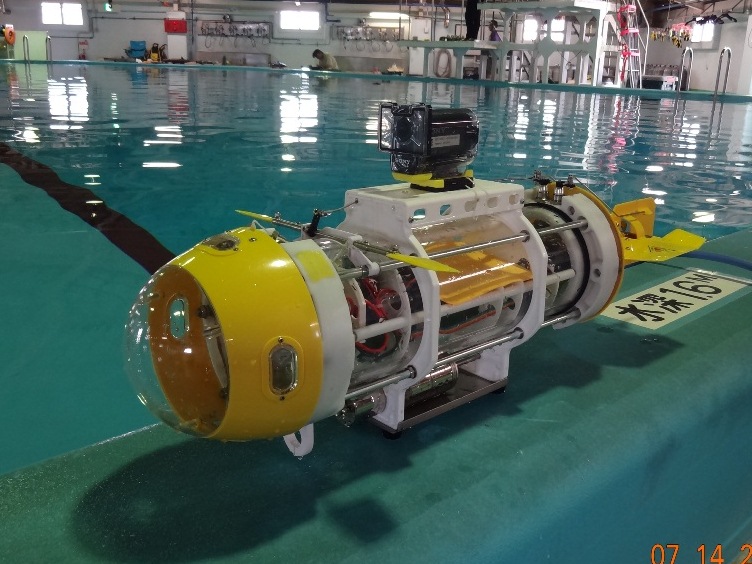
KPC-AUVKPC-AUV2013 長さ0.85m、15.5kg、自律型
全てハンドメイドで制作しています。そのため、制御だけではなく機器のセッティングや操作性にこだわりを持たせています。資料pdf AUV3 東京海洋大学
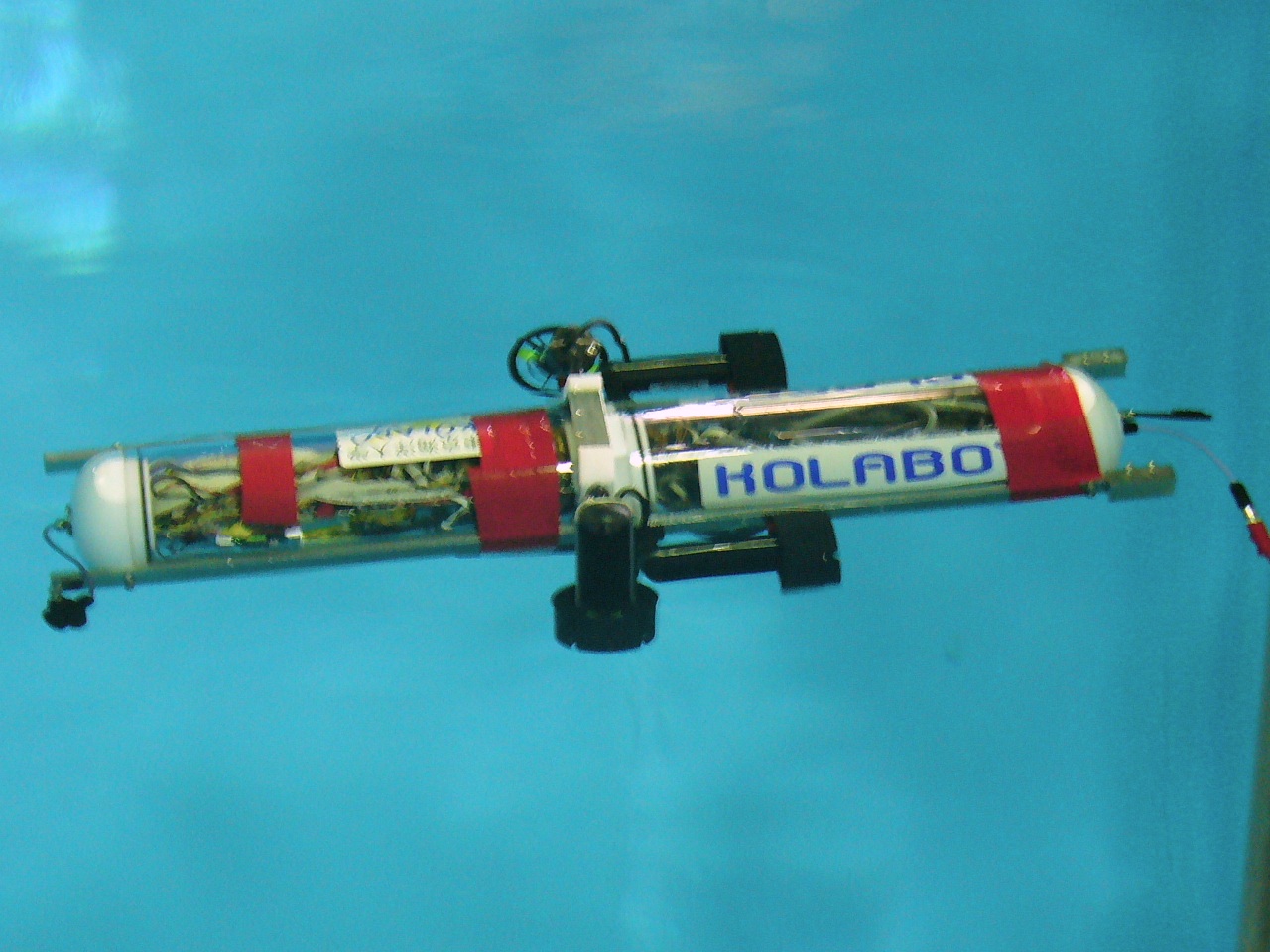
チームKOLABOTKOLABOT MINI 長さ0.88m、重さ19.1kg、自律型
小型テストベッドAUV「KOLABOT」は,東京海洋大学海洋工学部近藤研究室で開発された1~2人で実験を行えることをコンセプトとした機体です.小型であるため運用にかかる手間が少なく,実験なども少人数で行えます.前年度の慣性航法による制御を画像処理を主とした制御へと変更し、カメラを2台搭載しています。 AUV4 東京大学生産技術研究所
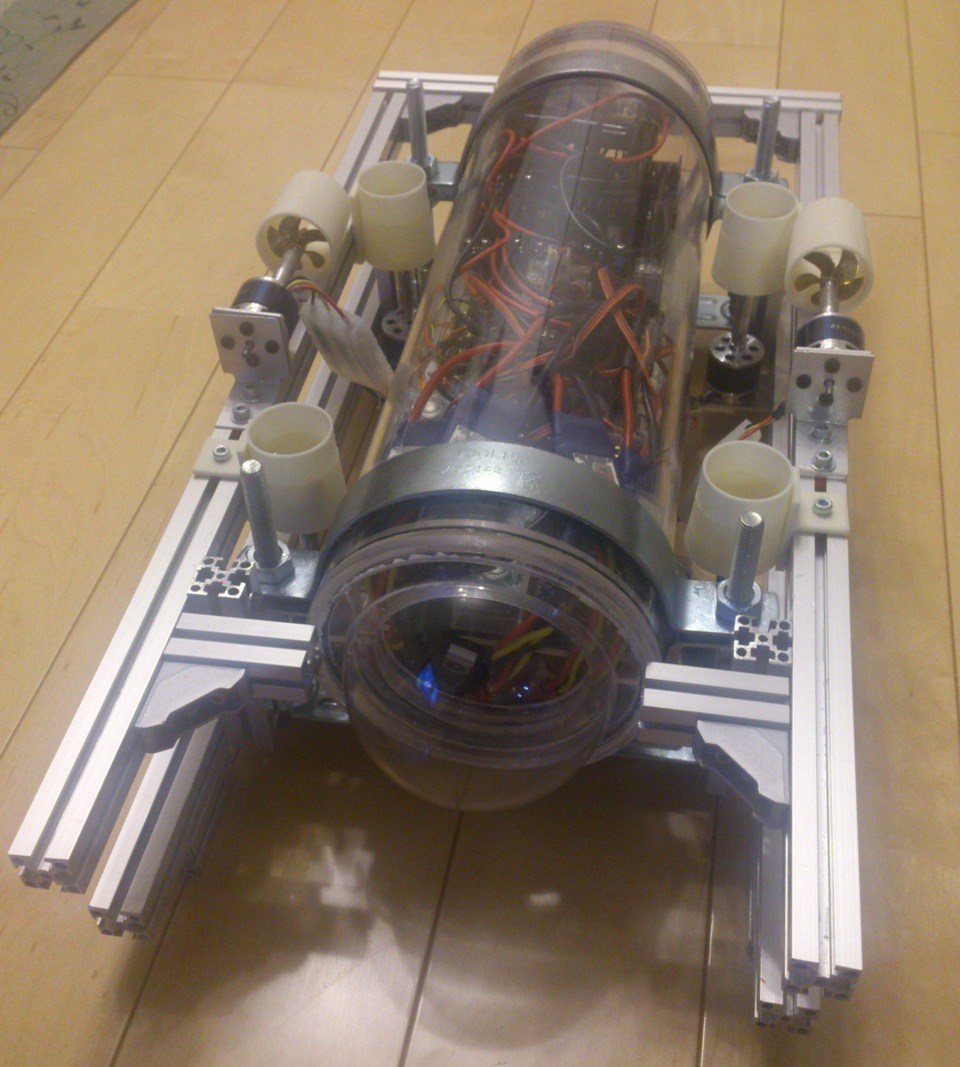
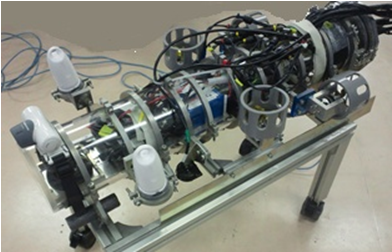
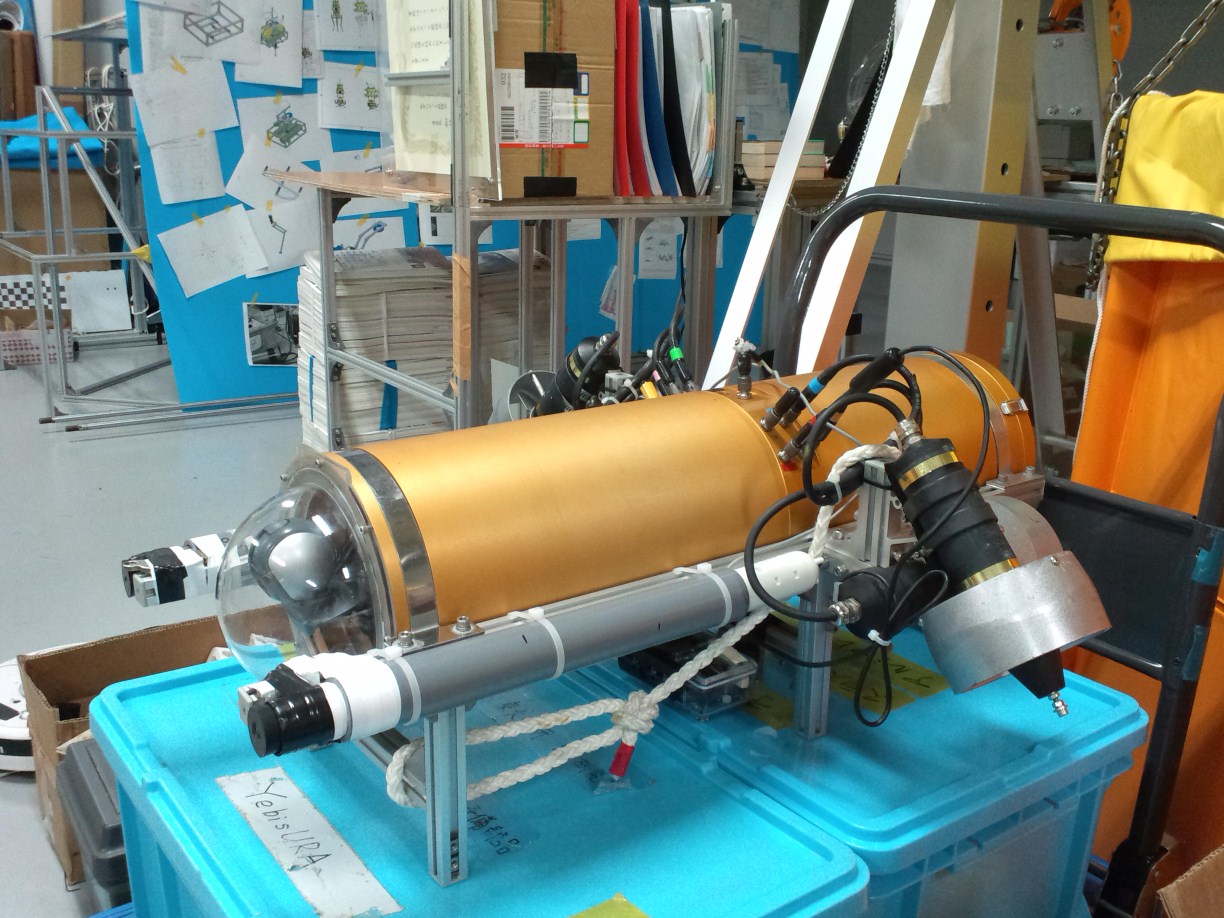
チーム Yebis-URAYebis-URA(エビスラ) 長さ0.8m、22.8kg、自律型
前部・下部にカメラを備え画像処理により状況を判断する自律型のホバリング型AUVです.4基のスラスタにより前後左右上下,ヨー回転を行えます.また,機体のロール方向の傾きを検知しカメラを水平に保つことで視界を良好にする自作ジャイロカメラを搭載しています.資料pdf AUV5 早稲田大学本庄高等学院
WAQUAWAQUA君 長さ0.6m、14.48kg
今回初参加の早稲田本庄が開発したWAQUAくんは、各部脱着を容易にし変更拡張を自在にした。その為、スラスター交換や各種プローブを搭載しさまざまなミッションに対応できるようにした。JAMSTECのプールだけでなく河川や港湾での使用をも視野に入れている。資料pdf フリー1 岡山商科大学附属高校
工業技術同好会N-TASHIRO/ M-TASHIRO/ A-WAKA
長さ0.3~0.8m、重さ5~10kgアクリルボックスにArduino、ビュートローバーミニARM、マインドスト-ムNXT(3ch)を入れてタミヤの水中モーターを制御させる。プログラムの練習キットとして製作。資料pdf/プレゼン資料pdf フリー2 東京工業大学附属科学技術高校
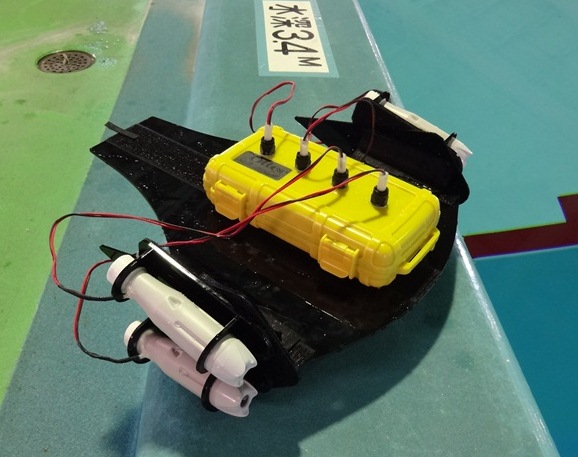
イルカ班イルカロボット 長さ0.55m、2.42kg、ヒレ推進
イルカのドルフィンキックを参考にし、ドルフィンキックに近づけた推進方法を実現させた水中ロボットです。 フリー3 東京工業大学附属科学技術高校
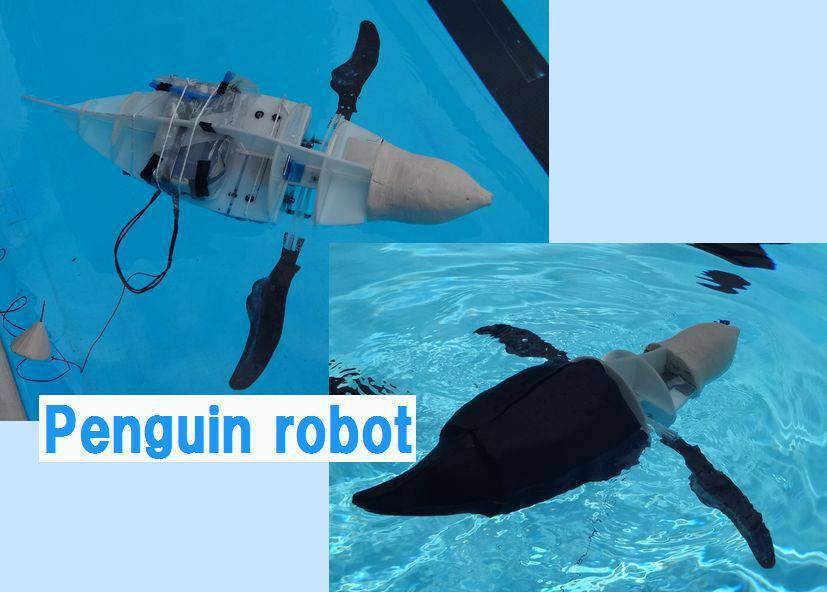
もるペン!もるペン! 長さ0.85m、4.24kg、ヒレ推進
東京工業大学附属科学技術高校3年機械分野課題研究チームによるペンギン型ロボットです。翼であるフリッパーを羽ばたき、進みます。開発に当たり、オリックス株式会社 すみだ水族館にご支援をいただき、本物のペンギンらしさを目指しました。資料pdf デモ1 鈴木技研 ResoTechLight
長さ1.5m、5kgロボットの給電には通常電気的な接点を利用した方法が採用されるが、その方法はロボットの位置決め精度を高くしなければならなかったり、特別な防塵、防水が必要であったりと欠点が多い。そこで現在、接点によらない送受電の方法を開発しており、本機はその技術要素のテストとデモンストレーションを目的とする。 デモ2 ケインパワークラフト開発 生体拡張自立航行潜水艇UZ101ケインプロトタイプ
(通称:Robo-ship II)長さ0.7m、20kg
ロボットの航行・制御をコンピューターではなく生物により行うことを目指す。生物が持つ脳は現在の計算機を遥かに凌駕しており、制御下に置ければ高性能で低消費エネルギーな自立航行装置として利用できる可能性を持っている。計算機にはない生物特有の問題を反復学習や向精神薬などの使用により制御し、生物の模倣ではなく機械的な拡張を目指す。 デモ3 千葉工業大学
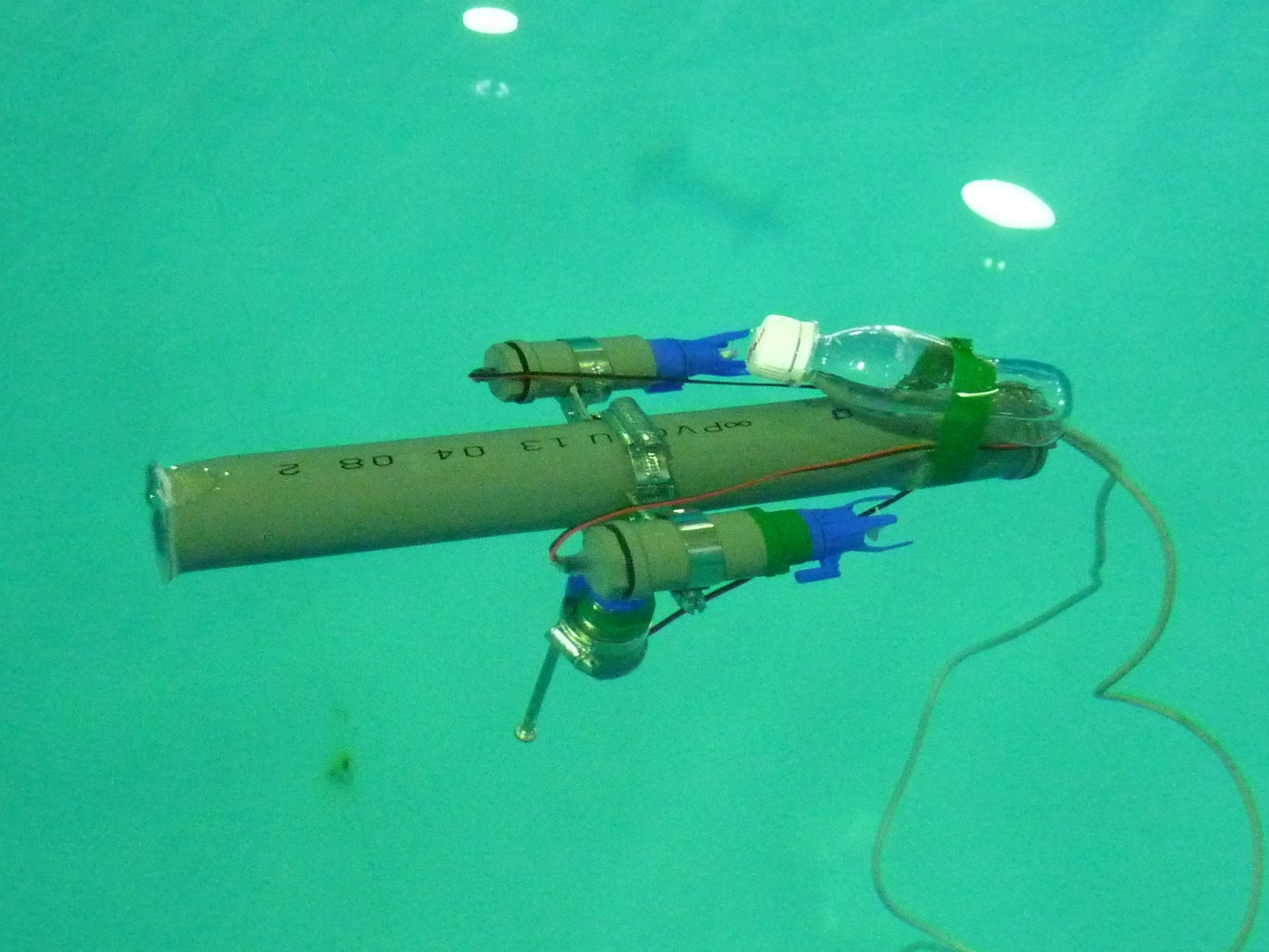
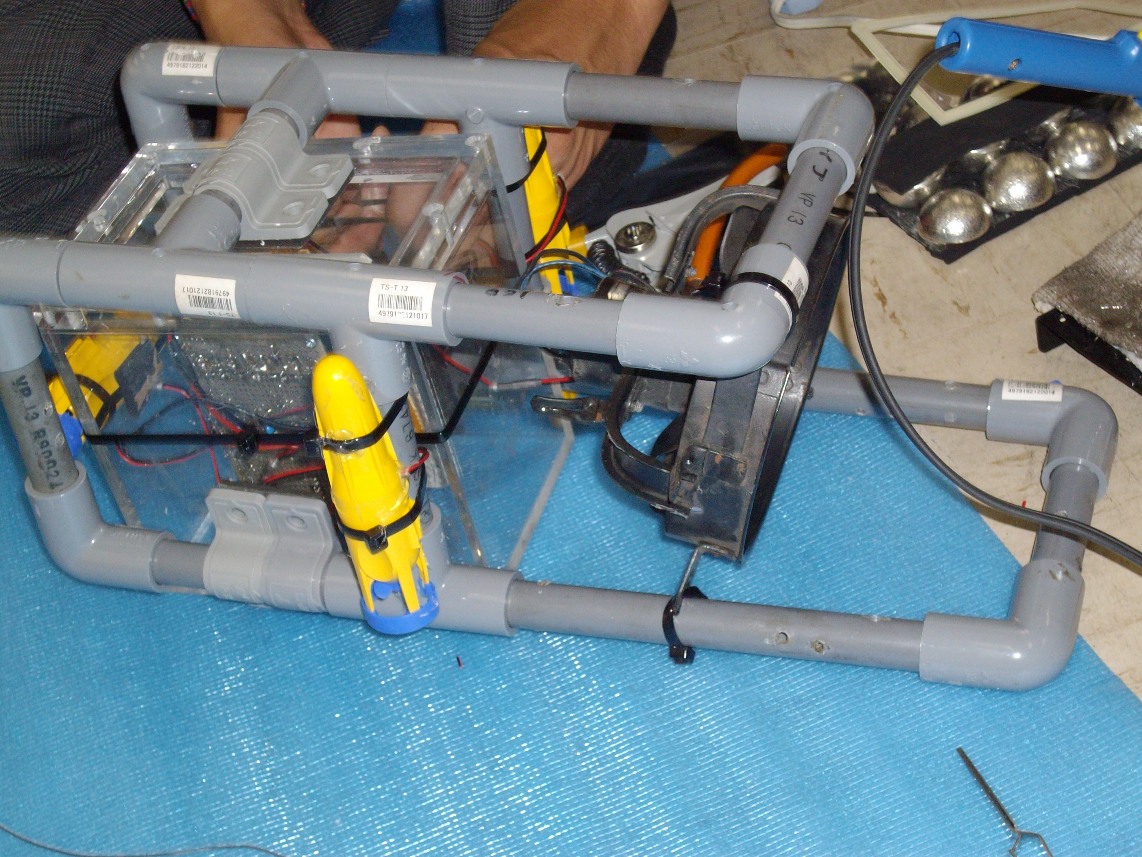
CIT -KIS-塩ビ艦 長さ0.5m、12kg
初めて水中ロボットを作ったので、できることは少ないですが、マグネットカップリングによる動力伝達をしてみようと思い、作りました。 デモ4
O.R.EVideoRay Pro4/ HydroView 長さ0.375m、6.1kg、市販
Pro4:300mクラス 多目的ROVベース 音響画像(blueView)、測位装置搭載(SBL、SSBL)、テザー式
HydroView(AquaBotex):50mクラス HDカメラ内蔵 重量5kg、充電式12Vニッカド、ipadコントロール
01 神奈川県立海洋科学高等学校 02 東京工業大学付属科学技術高等学校 03 慶応義塾湘南藤沢中高等部 04 早稲田大学本庄高等学院
- ●参加条件
(参加費)- 参加費無料。ただし機材搬送費、交通費、滞在費等は自己負担。
- (参加区分)
一般競技部門
(1日目及び2日目)ロボット持参。1日目の調整・プレゼンテーションと2日目の水中競技(課題コース又はフリー演技)の双方へ参加する。採点・表彰の対象となる。
競技ルール:13水中ロボットコンベンション in JAMSTEC 公式ガイドブック(2013.6.5更新)高校競技部門
(1日目及び2日目)高校生等を対象とし、実行委員会が提供した水中ロボット用パーツを組立・調整~操縦練習~水中競技を行う。7チームまで。
募集条件:高校競技部門 募集要項(2013.6.22)
水中ロボットを持参できるチームは一般競技部門で参加のこと。一般デモ参加
(2日目のみ)水中ロボット持参。2日目の水槽デモ(課題コース又はフリー演技)のみ参加する。採点対象外。 見学
(2日目)見学のみ。ただし本イベントでは一般・子供向けの体験操縦はありません。1日目も見学希望の方は申し込み時にその旨明記願います。
- (持ち込み水中ロボットの条件)
形式 自由(自作・市販問わず。水中に潜れなくても可) 制御方式 自由(自律、遠隔制御のどちらでも可) 寸法制限 全長2.0m 以内、全幅0.8m以内、全高1.0m以内(完成時) 重量制限 空中重量200kg以下(完成時)
- 潜水訓練プール棟の2階までホイストで吊り上げる場合の開口部寸法、吊り上げしろ等については、こちらを参照願います。- テザーケーブルで電力を供給するものについては事前に相談のこと(100V-20Aまで。それを越える場合は発電機を持参のこと)
- 市販のラジコン用プロポを使用する場合は、陸上用ラジコン(模型ボート、ラジコンカー等)に割り当てられた周波数に限るものとし、模型飛行機用の周波数は使用しないこと。
- ●主催等
- ●問合わせ先:
- 水中ロボコンinJAMSTEC実行委員会
E-mail:webmaster(at)aquarobo.com ("(at)"を"@"に置き換えて送信してください)
- ●これまでの取り組み
- ・水中ロボコンin JAMSTEC'10(2010年3月)
・水中ロボコンin JAMSTEC'12春(2012年3月)
・水中ロボコンin JAMSTEC'12夏(2012年9月)
・水中ビークルフリーミーティング(1~2ヶ月に1度の定期開催)
- ●リンク集(情報募集中)
Yahooの水中ロボコン情報グループに参加いただければ、水中ロボコン推進会議からのお知らせをメールで配信します。
- ・aqua-robocon-subscribe(at)yahoogroups.jp宛にメールをお送りください("at"を"@"に置き換えて送信のこと)。確認のメールが自動送信されますので、それに返信すれば登録が完了します。
・グループをやめる場合は、aqua-robocon-unsubscribe(at)yahoogroups.jp宛にメールをお送りください("at"を"@"に置き換えて送信のこと)、以下同様。注1)事前登録いただく水中ロボコン参加者限定メーリングリストとは別物ですので、ご注意ください。
注2)info@・・・、support@・・・、webmaster@・・・というアドレスでは登録できません。また、皆さん側のメールサーバーの中にはグループからの一斉送信メールを迷惑メールと判断して受信拒否するものがあり、その場合は当方ではどうにも対処できないのでご容赦願います(hotmailなど)。