'12水中ロボットコンベンションin JAMSTEC ”水中ロボコンin JAMSTEC'12” 公式サイト 
|
'12水中ロボットコンベンションin JAMSTEC ”水中ロボコンin JAMSTEC'12” 公式サイト
|
2012年3月7日更新
●開催目的- 本イベントの目的は、自作の水中ロボットによる競技会やプレゼンテーションを通じて参加者の交流の輪を広げるともに、工学的知識・技術を駆使して現実的な課題に挑む機会を提供することです。そして、アウトリーチ活動の一環として、子供たちや社会に向けて水中ロボット研究の楽しさと重要性をアピールすることです。
- ●日時
- 2012年3月10日(土)11:00 - 17:30(競技コースの公開、ロボットの調整、プレゼンテーション)
2011年3月11日(日) 9:00 - 17:00(競技、構内見学、表彰式)
- ●会場:独立行政法人 海洋研究開発機構(JAMSTEC)横須賀本部
- 潜水訓練ダイビングプール(21 m×21 m、水深:3.3m/1.5 m)及び本館大講義室、セミナー室
- ●参加チーム
発表
順所属
チーム名ロボット名 説明 画像 1 日本工業大学
物理体感工房B潜水管Al(アル) 長さ0.8m、30kg
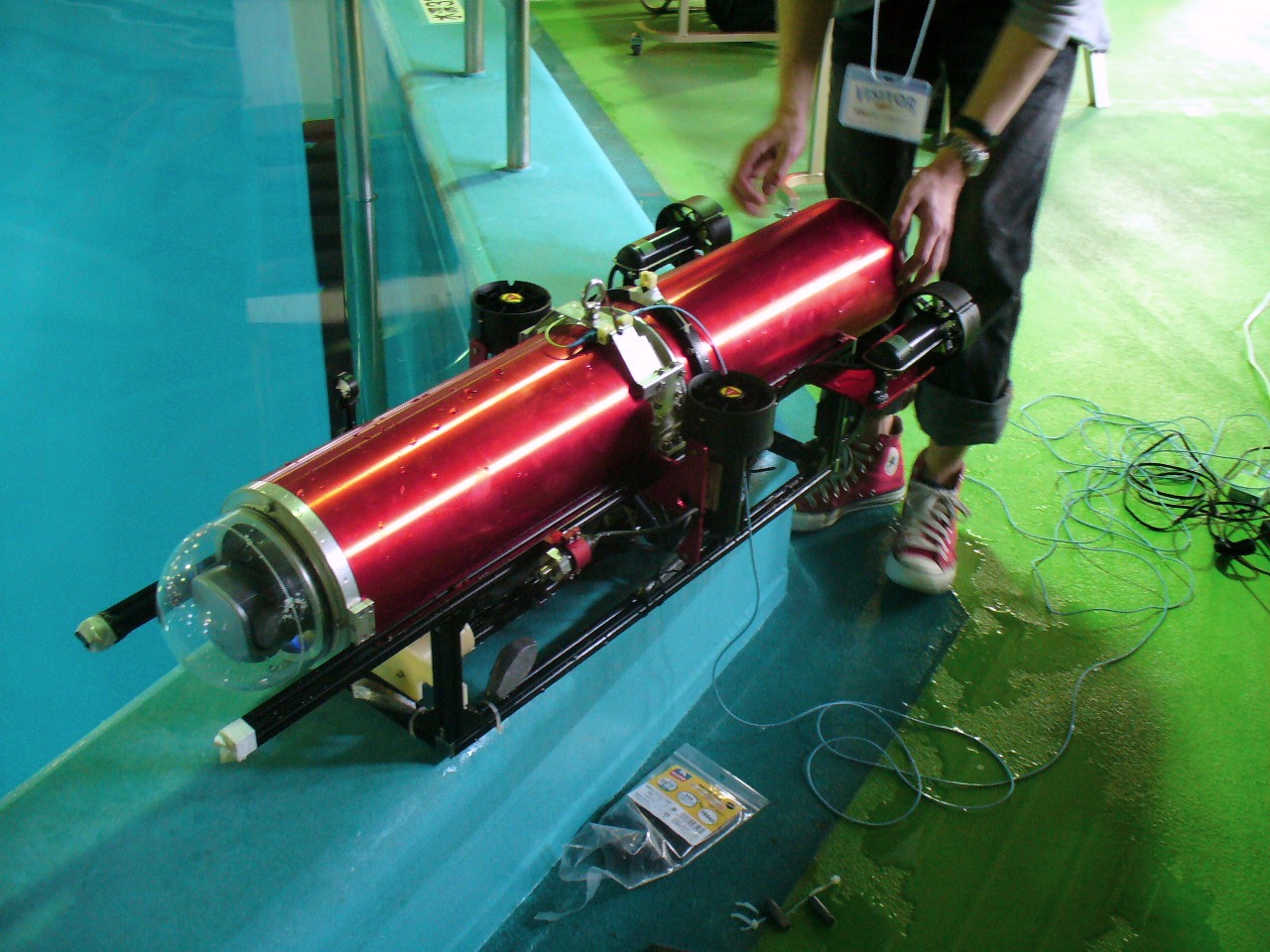
長さ0.8m、30kg。このロボットたちは、主に真空装置や圧力容器などの研究廃材から作られています。イチから設計されたロボットとは異なり、手に入る素材(主に船体)やキビシイ予算の制約の中、有志の技術力とカンパによって作られています。日本工業大学は、その野生のパーツを組み合わせて装置を作ってしまうことを得意とし、足らないところは物理の原始的な原理や、技術的なチカラ技でなんとかする。純粋に高度な研究をするのではなく、『水中を知りたい。』という探究心から生まれたロボットです。説明 2 九州職業能力開発大学校
KPC6KPC-AUV2011 長さ0.8m、16kg
自律型
前回出場したKPC-AUVは自然電磁場を計測するため、海で使用する自律型水中ロボットだったが、今回は、自律機能の実現のため、水中ロボコンに特化した自律型水中ロボットを開発した。昨年度と比べ、水中カメラをUSBカメラに、ブラシレスモータを水中で直接使用するなどし、小型・軽量化に成功したロボットとなっている。説明1/説明23 東京工業大学附属科学技術高等学校
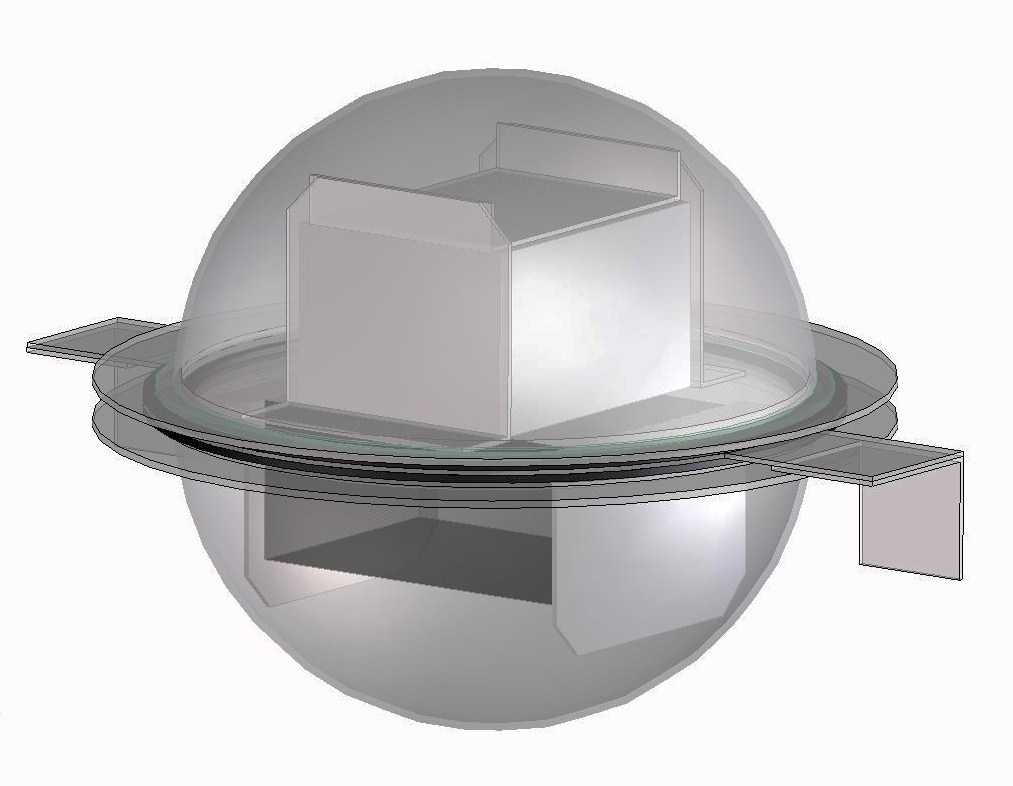
東工大付属 機械科ボルボット >長さ0.42m、3kg
カメラやセンサーを使用して各種調査活動をする。コントローラーを傾けて直感的な操作が可能。移動の自由度が高く、球形なので水の抵抗が少ない。説明 4 日本工業大学
物理体感工房A潜水管SUS(サス) 長さ1.1m、40kg
上記「潜水管Al」の説明を参照。説明 5 大阪市立大学
大阪市立大学チームFOCUS 全長28 cm,重量500g
鯉をモチーフとした魚型のロボットで,連続遊泳時間は5時間以上,また物体追跡機能を搭載した超小型・軽量のアクアバイオロボットです.説明 6 九州工業大学
ILaBirdDaryaBird 長さ1.0m、31kg
小型のシステムであり,簡単に運搬可能.パンチルト可能なカメラを搭載しており,環境調査や防波堤等の保守・点検に用いる事が可能.AUV(自律行動)/ROV(人による操作)を変更可能であり,幅広いミッションに対応可能. 画像情報に基づくナビゲーション(ライントラッキング,ブイドッキング,自己位置同定)やタンカー等の大型艇を想定した船底掃除(反力制御,自己位置同定,経路計画)といった用途への応用を想定している.説明 7 東京大学
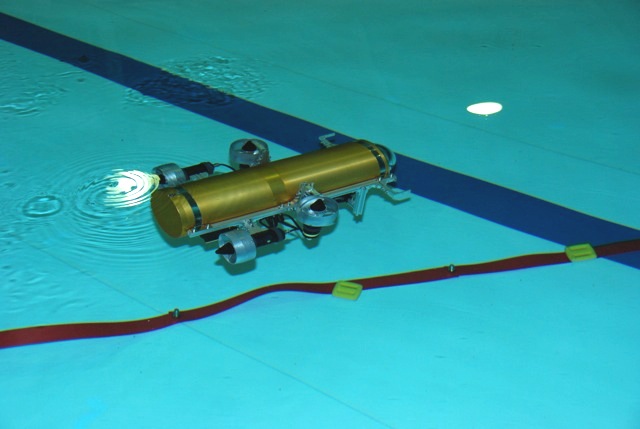
YebisURAチームYebisURA(エビスラ) 長さ0.7m、22kg
自律型の水中ロボット。前方のカメラから映像を取り込んで内部のPCで画像処理を行っている。また、推進用に2台、上下動用に2台のスラスターを備えている。説明 8 水中ビークルフリーミーティング
アクアモデラーズ水中ビークル工作事例と水中パーツ紹介 ・塩ビパイプ製ROV”ENB-03”:高校生向け。低予算で簡単に製作可能。有線により脱着式水中カメラでモニターしながら電波の届かない水深での操縦も可能。ラジコン操縦も可能。
・ペットボトル製水中グライダー:小中学生向け。無動力。任意の形状の翼型に交換可能。釣り糸で操縦及び回収を行う。
・2chラジコン”潜水Q”:中高生向け。2chで自らが回転して潜水するラジコン。
・AUV試験機:本体は塩ビ管。今は手動操縦だが、搭載カメラの画像をPCに飛ばし、画像認識を行い自動操縦するためのインターフェースを備えている。
・空き缶回収潜水艇:小学生向け。ラジコン潜水艦でプールに沈んでいる空き缶などを回収。
・水中パーツ:灯油ポンプ改造水中ジェット、自動深度安定装置/自動水平安定装置ほか9
O.R.E水中カメラロボット"VideoRay Pro3GTO" 長さ0.35m、4.8kg
多目的小型ROV(世界最多生産) マニュピュレーター 小型測位装置SBL スキャニングソナー搭載。体験操縦で協力 ●参加条件
(参加費)- 参加費無料。ただし機材搬送費、交通費、滞在費等は自己負担。
- (参加区分)
フル参加
(10日及び11日)ロボット持参。10日のプレゼンテーションと11日の水槽デモ(課題コース又はフリー演技)の双方へ参加する。採点・表彰の対象となる。競技ルールは以下の公式ガイドを参照のこと。 デモ参加
(11日のみ)ロボット持参。11日の水槽デモ(課題コース又はフリー演技)のみ参加する。採点対象外。 見学
(11日のみ)見学のみ。ただし本イベントでは一般・子供向けの体験操縦はありません。10日も見学希望の方は申し込み時にその旨明記願います。
- (参加作品の条件)
形式 自由(自作・市販問わず。水中に潜れなくても可) 制御方式 自由(自律、遠隔制御のどちらでも可) 寸法制限 全長2.0m 以内、全幅0.8m以内、全高1.0m以内(完成時) 重量制限 空中重量300kg以下(完成時)
- テザーケーブルで電力を供給するものについては事前に相談のこと(100V-20Aまで。それを越える場合は発電機を持参のこと)
- 市販のラジコン用プロポを使用する場合は、陸上用ラジコン(模型ボート、ラジコンカー等)に割り当てられた周波数に限るものとし、模型飛行機用の周波数は使用しないこと。詳細については、こちらをどうぞ。
‘12水中ロボットコンベンション in JAMSTEC公式ガイドブック(2012.3.7更新)
- ●応募方法
- ・見学を含む全ての参加者は事前登録が必要です。
・登録方法
・応募締め切り フル/デモ参加者は2012年2月5日、見学希望者は2012年2月29日まで
- ① 代表者氏名、所属、メールアドレス、チーム人数、参加枠(フル、デモ、見学)をwebmaster(at)aquarobo.com("at"を"@"に置き換えて送信)まで連絡してください(仮登録)。
② 仮登録いただいたメールアドレス宛に登録フォームをお送りしますので、ロボットやチームメンバーの詳細などを記入して返信してください。
③ 登録フォームの受理をもって登録完了とします。
・応募者多数の場合、〆切前でも募集を締め切ることがあるので、なるべく早めの登録をお願いします。もし予定人数を越えた場合は、製作者を優先させ、事前登録いただいた方でも入場を遠慮いただくよう連絡する場合がありますので、あらかじめご了承ください。
- ●注意事項:
- (来構方法)
- ・自動車による搬入が可能(当日・前日とも)。事前に申し出てください。(道路マップ)
・電車・徒歩の方:来構方法。 当日は直行の路線バスが運休のため、11日(日)のみシャトルバス(追浜駅発9:20、JAMSTEC発16:50)を予定。参加登録時にその旨お知らせください。
・運送業者・宅配便業者による本人立会いなしの事前搬入については事務局にご相談ください。
- (その他)
- ・当日は、水中ロボコン会場以外のJAMSTECの施設は公開されていません(一部施設について見学会を予定)
・当日は、会場の徒歩圏内に飲食店・コンビニはありません。ソフトドリングの自販機はあります。持ち込んだ飲食物は事務局指定の場所で飲食願います。
・周辺の宿泊情報については仮登録いただいたチームにお知らせします。
- ●主催等
共 催
(予定)水中ロボコン推進会議、(社)日本船舶海洋工学会、IEEE/OES日本支部、MTS日本支部、テクノオーシャン・ネットワーク、(独)海洋研究開発機構 後 援
(予定)東京大学生産技術研究所海中工学センター、東京大学海洋アライアンス 協 力 アクアモデラーズ・ミーティング 実行組織 水中ロボコンinJAMSTEC実行委員会(水中ロボコン推進会議)及びJAMSTEC
- ●問合わせ先:
- 水中ロボコンinJAMSTEC実行委員会
E-mail:webmaster(at)aquarobo.com ("(at)"を"@"に置き換えて送信してください)
- ●これまでの取り組み
- ・水中ロボコンin JAMSTEC'10(2010年3月)
・水中ビークルフリーミーティング(1~2ヶ月に1度の定期開催)