'12悈拞儘儃僢僩僐儞儀儞僔儑儞in JAMSTEC壞 乭悈拞儘儃僐儞in JAMSTEC'12壞乭 岞幃僒僀僩  |
'12悈拞儘儃僢僩僐儞儀儞僔儑儞in JAMSTEC壞 乭悈拞儘儃僐儞in JAMSTEC'12壞乭 岞幃僒僀僩 |
2012擭9寧30擔峏怴
仠奐嵜栚揑- 丂杮僀儀儞僩偺栚揑偼丄帺嶌偺悈拞儘儃僢僩偵傛傞嫞媄夛傗僾儗僛儞僥乕僔儑儞傪捠偠偰嶲壛幰偺岎棳偺椫傪峀偘傞偲傕偵丄岺妛揑抦幆丒媄弍傪嬱巊偟偰尰幚揑側壽戣偵挧傓婡夛傪採嫙偡傞偙偲偱偡丅偦偟偰丄傾僂僩儕乕僠妶摦偺堦娐偲偟偰丄巕嫙偨偪傗幮夛偵岦偗偰悈拞儘儃僢僩尋媶偺妝偟偝偲廳梫惈傪傾僺乕儖偡傞偙偲偱偡丅
- 仠擔帪
- 2012擭9寧1擔(搚) 12:30 - 17:30乮嫞媄僐乕僗偺岞奐丄儘儃僢僩偺挷惍丄僾儗僛儞僥乕僔儑儞乯
2012擭9寧2擔(擔) 10:00 - 16:30乮悈拞嫞媄丄峔撪尒妛丄昞彶幃乯
- 仠夛応丗撈棫峴惌朄恖 奀梞尋媶奐敪婡峔乮JAMSTEC乯墶恵夑杮晹
- 愽悈孭楙僟僀價儞僌僾乕儖乮21 m亊21 m丄悈怺丗3.3m乛1.5 m乯媦傃杮娰戝島媊幒丄僙儈僫乕幒
- 仠嶲壛僠乕儉
嫞媄弴 強懏
僠乕儉柤儘儃僢僩柤 愢柧 夋憸 堦斒01 嬨廈岺嬈戝妛
TEAM ILABDaryaBird 挿偝1.0m丄30kg丄帺棩宆
丂彫宆偺僔僗僥儉偱偁傝丆娙扨偵塣斃壜擻丏僷儞僠儖僩壜擻側僇儊儔傪搵嵹偟偰偍傝丆娐嫬挷嵏傗杊攇掔摍偺曐庣丒揰専偵梡偄傞帠偑壜擻丏俙倀倁乮帺棩峴摦乯乛俼俷倁乮恖偵傛傞憖嶌乯傪曄峏壜擻偱偁傝丆暆峀偄儈僢僔儑儞偵懳墳壜擻丏
丂夋憸忣曬偵婎偯偔僫價僎乕僔儑儞乮儔僀儞僩儔僢僉儞僌丆僽僀僪僢僉儞僌丆帺屓埵抲摨掕乯傗僞儞僇乕摍偺戝宆掵傪憐掕偟偨慏掙憒彍乮斀椡惂屼丆帺屓埵抲摨掕丆宱楬寁夋乯偲偄偭偨梡搑傊偺墳梡傪憐掕偟偰偄傞丏愢柧堦斒02 擔杮岺嬈戝妛
僠乕儉丒傾儈傾儞僂儞僨傿乕僱 挿偝200 cm丄50 kg
丂戝弌椡悇恑憰抲丒戝宆慏懱偱丄僜僼僩僂僃傾偱偼側偔僴乕僪僂僃傾偺妋棫傪栚巜偟傑偡丅 丂 堦斒03 憹揷惢嶌強
Delphinus愽悈娗丂Delphinus 挿偝0.7m丄30kg
丂Delphinus偼丄扺悈堟偺僀儖僇偲暲傫偱丄崅懍捛廬娤應傪峴偆偨傔偵奐敪偝傟傑偟偨丅Delphinus偺桼棃偼丄惎嵗偺亂偄傞偐嵗亃丄塸岅偺亂恀奀撠亃(儅僀儖僇壢乯偵偪側傫偱偄傑偡丅
丂僀儖僇偼丄捠忢偼5km/h偐傜11km/h掱搙偺懍搙偱塲偓傑偡偑丄抁帪娫側傜偽45km/h掱搙偲嬌傔偰崅懍側塲椡傪桳偡偨傔丄偦傟偵尒崌偆嫮椡側悇恑婍傪搵嵹偟偨婡懱偑昁梫偱偡丅嫮椡側1幉僕僃僢僩億儞僾悇恑傪巊梡偟丄悈拞懍椡5僲僢僩埲忋丒悈拞儘儃僐儞巎忋嵟懍偺婡懱傪栚巜偟偰偄傑偡丅愢柧堦斒04 宑滀媊弇戝妛
悈拞奐戱僠乕儉Mk-2 挿偝0.5m, 15kg
丂尰嵼丆摉戝妛偱偼悈拞儘儃僢僩偺奐敪幚愌偑側偄.偦偙偱丆崱屻偺杮奿揑側奐敪傪栚昗偵丆妛壢墶抐揑側僠乕儉傪寢惉偟丆屄乆偺梫慺尋媶偑壜擻側僔儞僾儖側婡懱傪奐敪偟偰偄傞丏愢柧 丂 堦斒05 搶嫗岺嬈戝妛晬懏壢妛媄弍崅摍妛峑
搶岺戝晬懏僄僀儘儃僢僩僠乕儉Raybot 挿偝0.8m丄12kg丄僸儗悇恑
丂僄僀傪儌僨儖偲偟丄儘儃僢僩杮懱傪偡傋偰帺暘偨偪偱惢嶌偟傑偟偨丅僸儗偵偼僇儉婡峔傪梡偄傑偡丅旜僸儗傪梡偄偰忋徃丄壓崀偟傑偡丅愢柧 丂 堦斒06 嬨廈怑嬈擻椡奐敪戝妛峑
KPC-AUVKPC-AUV2012 挿偝0.8m丄13.26kg丄帺棩宆
丂巹偨偪偑奐敪偟偨AUV偼,僽僀僞僢僠丒儔儞僨傿儞僌丒儔僀儞僩儗乕僗丒僎乕僩愽傝偺嫞媄梡偺婡擻傪搵嵹偟偨丏
丂杮擭3寧偵弌応偟偨KPC-AUV2011偼,徠柧側偳偺塭嬁偵傛傝夋憸張棟偑晄埨掕偲側傞偙偲偑傢偐偭偨丏崱夞偼偙偺栤戣傪夝寛偡傞偨傔偵悈拞儔僀僩傪搵嵹偟丆夋憸張棟傪埨掕壔偝偣偨丏傑偨丆孹幬僙儞僒偲曽埵僙儞僒傪搵嵹偡傞偙偲偱丆嵶偐側慁夞傪壜擻偲偟偰偄傞丏愢柧堦斒07 搶嫗奀梞戝妛
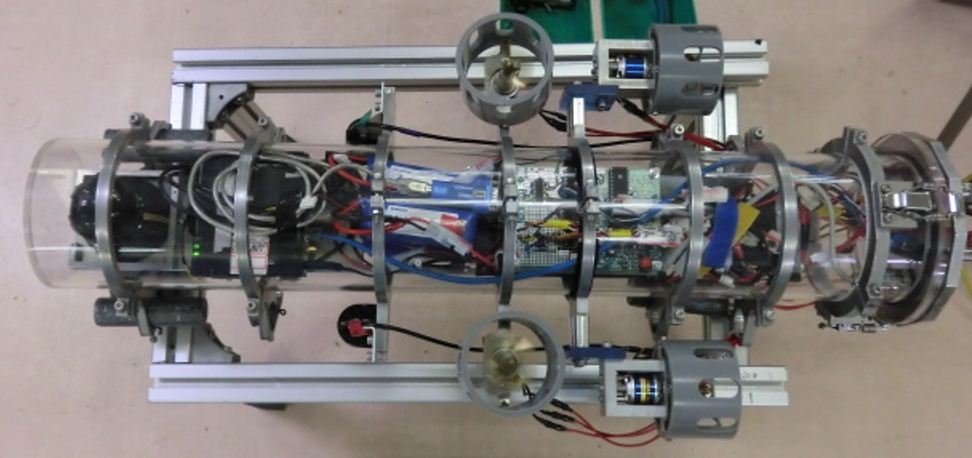
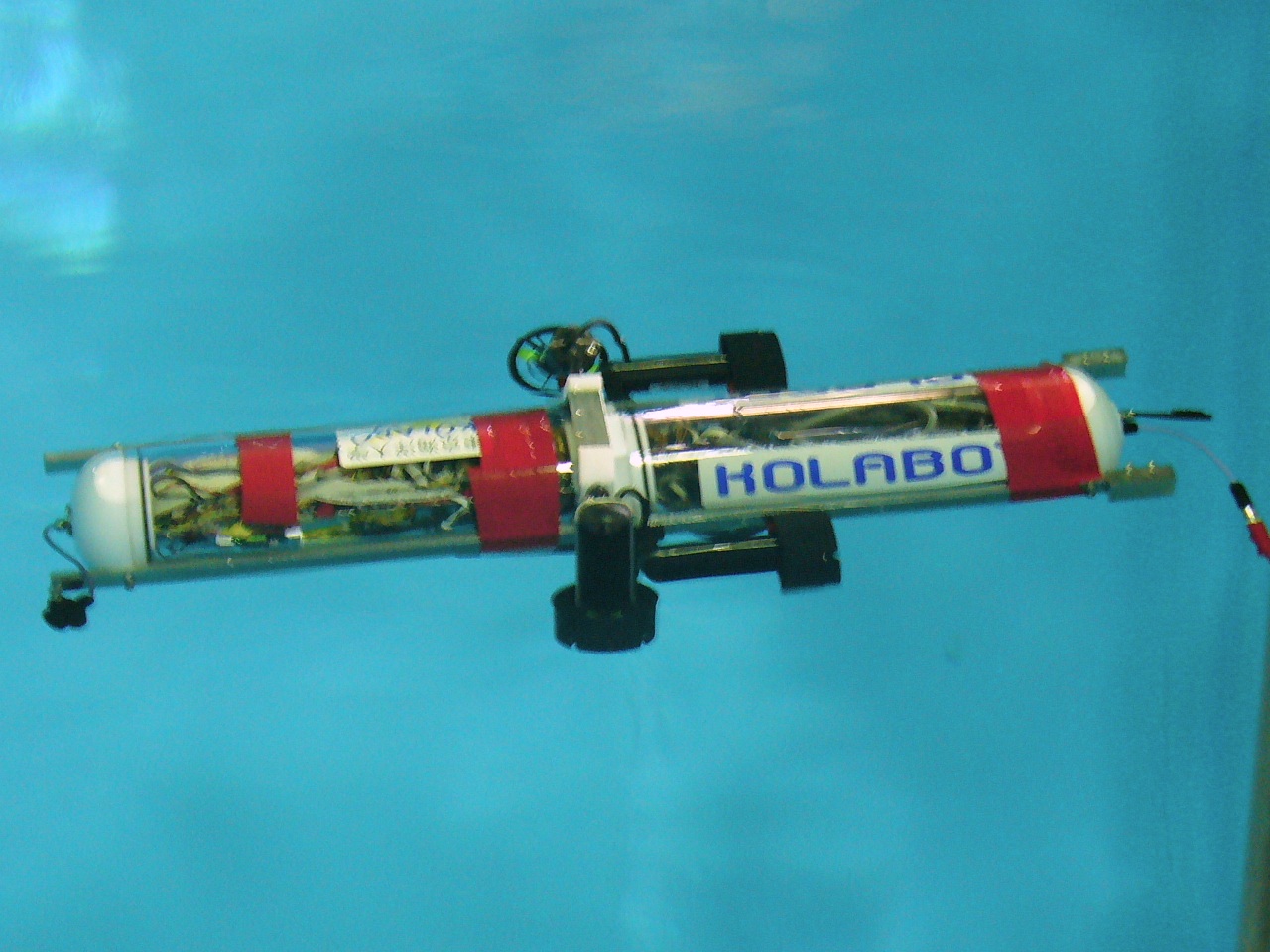
僠乕儉KOLABOT乮戙棟乯KOLABOT 挿偝1m丄廳偝20kg丄帺棩宆
彫宆僥僗僩儀僢僪AUV乽KOLABOT乿偼丆搶嫗奀梞戝妛奀梞岺妛晹嬤摗尋媶幒偱奐敪偝傟偨1乣2恖偱幚尡傪峴偊傞偙偲傪僐儞僙僾僩偲偟偨婡懱偱偡丏慡挿1m嬻拞廳検20kg偲悈拞儘儃僢僩偲偟偰偼彫宆偱偁傞偨傔塣梡偵偐偐傞庤娫偑彮側偔丆幚尡側偳傕彮恖悢偱峴偊傑偡丏奺庬僙儞僒傪搵嵹偟偰偍傝丆僨僢僪儗僐僯儞僌偵傛傞峲峴偑壜擻偱偡丏尰嵼丆嬤摗愭惗偑挿婜奀奜弌挘拞偺偨傔丆惔悈尋偑塣梡偟偰偄傑偡丏愢柧 堦斒08 崙棫戜榩戝妛
GrootGiant Fish
挿偝0.9m丄廳偝19.96kg丄僸儗悇恑丂Giant Fish偼抏惈僸儗丄晜椡僄儞僕儞丄僐儞僷僗丄怺搙僙儞僒乕媦傃僐儞僺儏乕僞塮憸梡僇儊儔俀戜傪旛偊偰偄傞丅悇恑僄僱儖僊乕偑愡栺偱偒偰儘儃僢僩偺塣梡帪娫傪墑挿偱偒傞丅 偝傜偵崅揹椡枾搙偺儕僠僂儉僀僆儞揹抮傪巊偆偙偲偵傛偭偰係帪娫埲忋塣梡偱偒傞丅僙儞僒乕偼廃曈娐嫬傪棟夝偟丄儈僢僔儑儞姰椆偺偨傔偺巜帵偵廬傢偣傞偺偵栶棫偮丅愢柧 丂 堦斒09 搶嫗戝妛
僠乕儉 Yebis-URAYebisURA(僄價僗儔) 挿偝0.8m丄19.8kg丄帺棩宆
CPU: Let's Note CF-J10 Windows XP丄僗儔僗僞: x 4丄帺桼搙: 僒乕僕丒儘乕儖丒僸乕僽丒僗僂僃僀丄僇儊儔: 慜曽 x 1丆壓曽 x 1愢柧 堦斒10 戝嶃巗棫戝妛
僷儚乕僔僗僥儉儔儃俥俷俠倀俽 慡挿28.5cm丆廳検500g丄僸儗悇恑
丂岋傪儌僠乕僼偲偟偨嫑宆偺儘儃僢僩偱丆楢懕梀塲帪娫偼5帪娫埲忋丆傑偨暔懱捛愓婡擻傪搵嵹偟偨挻彫宆丒寉検偺傾僋傾僶僀僆儘儃僢僩偱偡丏埲慜偵斾傋偰愽悈擻椡偑傾僢僾偟傑偟偨丏愢柧 僨儌01 愮梩戝妛戝妛堾岺妛尋媶壢
RGSNAIBU FLOW
挿偝0.25m丄廳偝1kg撪晹棳傟傪棙梡偟偰丄巔惃惂屼傪峴偆儘儃僢僩偱偡丅曽岦傪曄峏偡傞嵺丄廃埻傊偺棎傟偑彮側偄偙偲偑摿挜偱偡丅 丂 僨儌02 搶嫗戝妛惗嶻媄弍尋媶強乛憹揷惢嶌強
悈拞儘儃僶僩儖幚尰僠乕儉僾儘乕僽嫑棆丒儔儞僠儍乕
挿偝0.4m丄廳偝0.3kg丂棨忋儘儃僐儞偵偁偭偰悈拞儘儃僐儞偵柍偄傕偺丄偦傟偼乽僶僩儖乿偺梫慺偱偡丅偟偐偟墸傝崌偄偼儊僇偑暋嶨偵側傝偡偓傑偡偟丄偐偲偄偭偰懱摉偨傝偡傞傢偗偵傕偄偒傑偣傫丅偦偙偱変乆偼堦戜2000墌掱搙偱惢嶌偱偒傞丄娙堈側僾儘乕僽乮彫宆嫑棆乯偺奐敪偵庢傝慻傫偱偄傑偡丅儘儃僢僩傪栤傢偢偵憰拝壜擻偱丄幩掱嫍棧偼俆倣掱搙傪栚巜偟偰偄傑偡丅姰惉偟偨傜惢嶌曽朄傪岞奐偡傞梊掕偱偡丅愢柧 僨儌03
O.R.EVideoRay Pro3GTO 挿偝0.35m丄4.8kg丄巗斕
懡栚揑彫宆ROV乮悽奅嵟懡惗嶻乯丂儅僯儏僺儏儗乕僞乕丂丂彫宆應埵憰抲SBL丂僗僉儍僯儞僌僜僫乕搵嵹丅懱尡憖廲偱嫤椡 僨儌04 悈拞價乕僋儖僼儕乕儈乕僥傿儞僌
傾僋傾儌僨儔乕僘悈拞價乕僋儖岺嶌帠椺偲悈拞僷乕僣徯夘
丒墫價僷僀僾惢ROV乭ENB-03乭丗崱夞偺崅峑嫞媄晹栧岦偗偵奐敪丅掅梊嶼偱娙扨偵惢嶌壜擻丅儔僕僐儞憖廲偩偑丄桳慄偵傛傝扙拝幃悈拞僇儊儔偱儌僯僞乕偟側偑傜揹攇偺撏偐側偄悈怺偱偺憖廲傕壜擻丅
丒儁僢僩儃僩儖惢悈拞僌儔僀僟乕丗彫拞妛惗岦偗丅柍摦椡丅擟堄偺宍忬偺梼宆偵岎姺壜擻丅掁傝巺偱憖廲媦傃夞廂傪峴偆丅
丒俀們倛儔僕僐儞乭愽悈俻乭丗拞崅惗岦偗丅2ch偱帺傜偑夞揮偟偰愽悈偡傞儔僕僐儞丅
丒俙倀倁帋尡婡丗杮懱偼墫價娗丅崱偼庤摦憖廲偩偑丄搵嵹僇儊儔偺夋憸傪PC偵旘偽偟丄夋憸擣幆傪峴偄帺摦憖廲偡傞偨傔偺僀儞僞乕僼僃乕僗傪旛偊偰偄傞丅
丒嬻偒娛夞廂愽悈掵丗彫妛惗岦偗丅儔僕僐儞愽悈娡偱僾乕儖偵捑傫偱偄傞嬻偒娛側偳傪夞廂丅
丒悈拞僷乕僣丗摂桘億儞僾夵憿悈拞僕僃僢僩丄帺摦怺搙埨掕憰抲乛帺摦悈暯埨掕憰抲傎偐崅峑 恄撧愳導棫
奀梞壢妛崅摍妛峑丂 丂 丂 崅峑 搶岺戝晅懏
壢妛媄弍崅峑
俙僠乕儉媦傃俛僠乕儉丂 丂 丂 崅峑 壀嶳彜壢戝妛晬懏崅峑乛
搶岺戝晅懏壢妛媄弍崅峑俠崌摨僠乕儉丂 丂 丂 崅峑 宑墳媊弇
徝撿摗戲拞崅摍晹
揹巕岺妛尋媶晹丂 丂 丂
- 仠嶲壛忦審
丂乮嶲壛旓乯- 丂嶲壛旓柍椏丅偨偩偟婡嵽斃憲旓丄岎捠旓丄懾嵼旓摍偼帺屓晧扴丅
- 丂乮嶲壛嬫暘乯
堦斒嫞媄晹栧
乮1擔媦傃2擔乯丂儘儃僢僩帩嶲丅1擔偺挷惍丒僾儗僛儞僥乕僔儑儞偲2擔偺悈拞嫞媄(壽戣僐乕僗枖偼僼儕乕墘媄)偺憃曽傊嶲壛偡傞丅嵦揰丒昞彶偺懳徾偲側傞丅嫞媄儖乕儖偼偙偪傜丗12悈拞儘儃僢僩僐儞儀儞僔儑儞 in JAMSTEC 壞 岞幃僈僀僪僽僢僋乮2012.8.28峏怴乯 崅峑嫞媄晹栧
乮1擔媦傃2擔乯丂崅峑惗摍傪懳徾偲偟丄幚峴埾堳夛偑採嫙偟偨悈拞儘儃僢僩梡僷乕僣傪慻棫丒挷惍乣憖廲楙廗乣悈拞嫞媄傪峴偆丅俆僠乕儉傑偱丅曞廤傪掲傔愗傝傑偟偨丅崅峑嫞媄晹栧 曞廤梫崁乮2012.7.3乯
丂悈拞儘儃僢僩傪帩嶲偱偒傞僠乕儉偼堦斒嫞媄晹栧偱嶲壛偺偙偲丅堦斒僨儌嶲壛
乮2擔偺傒乯丂悈拞儘儃僢僩帩嶲丅2擔偺悈憛僨儌乮壽戣僐乕僗枖偼僼儕乕墘媄乯偺傒嶲壛偡傞丅嵦揰懳徾奜丅 尒妛
乮2擔偺傒乯丂尒妛偺傒丅偨偩偟杮僀儀儞僩偱偼堦斒丒巕嫙岦偗偺懱尡憖廲偼偁傝傑偣傫丅1擔傕尒妛婓朷偺曽偼怽偟崬傒帪偵偦偺巪柧婰婅偄傑偡丅
- 丂乮帩偪崬傒悈拞儘儃僢僩偺忦審乯
宍幃 帺桼乮帺嶌丒巗斕栤傢偢丅悈拞偵愽傟側偔偰傕壜乯 惂屼曽幃 帺桼乮帺棩丄墦妘惂屼偺偳偪傜偱傕壜乯 悺朄惂尷 慡挿2.0m 埲撪丄慡暆0.8倣埲撪丄慡崅1.0倣埲撪乮姰惉帪乯 廳検惂尷 嬻拞廳検200kg埲壓乮姰惉帪乯
- 愽悈孭楙僾乕儖搹偺俀奒傑偱儂僀僗僩偱捿傝忋偘傞応崌偺奐岥晹悺朄丄捿傝忋偘偟傠摍偵偮偄偰偼丄偙偪傜傪嶲徠婅偄傑偡丅- 僥僓乕働乕僽儖偱揹椡傪嫙媼偡傞傕偺偵偮偄偰偼帠慜偵憡択偺偙偲乮100V-20A傑偱丅偦傟傪墇偊傞応崌偼敪揹婡傪帩嶲偺偙偲乯
- 巗斕偺儔僕僐儞梡僾儘億傪巊梡偡傞応崌偼丄棨忋梡儔僕僐儞乮柾宆儃乕僩丄儔僕僐儞僇乕摍乯偵妱傝摉偰傜傟偨廃攇悢偵尷傞傕偺偲偟丄柾宆旘峴婡梡偺廃攇悢偼巊梡偟側偄偙偲丅
- 仠墳曞曽朄
- 丒尒妛傪娷傓慡偰偺嶲壛幰偼帠慜搊榐偑昁梫偱偡丅
丒搊榐曽朄
丒墳曞掲傔愗傝丗堦斒嫞媄晹栧丄堦斒僨儌晹栧媦傃崅峑嫞媄晹栧偺嶲壛怽偟崬傒偼掲傔愗傝傑偟偨丅尒妛婓朷幰偼2012擭8寧24擔傑偱丄偨偩偟憤悢150恖偵払偟偨抜奒偱掲傔愗傜偣偰偄偨偩偒傑偡偺偱丄偁傜偐偠傔偛彸抦偍偒偔偩偝偄丅
- 嘆丂戙昞幰巵柤丄強懏丄儊乕儖傾僪儗僗丄僠乕儉恖悢丄嶲壛榞乮僼儖丄僨儌丄尒妛乯傪webmaster(at)aquarobo.com乮"at"傪"@"偵抲偒姺偊偰憲怣乯傑偱楢棈偟偰偔偩偝偄乮壖搊榐乯丅
嘇 壖搊榐偄偨偩偄偨儊乕儖傾僪儗僗埗偵搊榐僼僅乕儉傪偍憲傝偟傑偡偺偱丄儘儃僢僩傗僠乕儉儊儞僶乕偺徻嵶側偳傪婰擖偟偰曉怣偟偰偔偩偝偄丅
嘊 搊榐僼僅乕儉偺庴棟傪傕偭偰搊榐姰椆偲偟傑偡丅
- 仠拲堄帠崁丗
- 丂乮棃峔曽朄乯
- 丒帺摦幵偵傛傞斃擖偑壜擻乮摉擔丒慜擔偲傕乯丅帠慜偵怽偟弌偰偔偩偝偄丅乮摴楬儅僢僾乯
丒揹幵丒搆曕偺曽丗摉擔偼捈峴偺楬慄僶僗偑塣媥偺偨傔丄捛昹墂偐傜僞僋僔乕傑偨偼嫗媫僶僗乽捛昹幵屔乿偐傜搆曕俀km乮棃峔曽朄乯丅9/2偺傒僔儍僩儖僶僗偑侾曋塣峲偟傑偡乮挬偼捛昹墂9:20 敪丄婣傝偼婡峔16:50 敪乯丅
丒塣憲嬈幰丒戭攝曋嬈幰偵傛傞杮恖棫夛偄側偟偺帠慜斃擖偵偮偄偰偼帠柋嬊偵偛憡択偔偩偝偄丅
- 丂乮偦偺懠乯
- 丒摉擔偼丄悈拞儘儃僐儞夛応埲奜偺JAMSTEC偺巤愝偼岞奐偝傟偰偄傑偣傫乮堦晹巤愝偵偮偄偰尒妛夛傪梊掕乯
丒摉擔偼丄夛応偺搆曕寳撪偵堸怘揦丒僐儞價僯偼偁傝傑偣傫丅僜僼僩僪儕儞僌偺帺斕婡偼偁傝傑偡丅帩偪崬傫偩堸怘暔偼帠柋嬊巜掕偺応強偱堸怘婅偄傑偡丅
丒廃曈偺廻攽忣曬偵偮偄偰偼壖搊榐偄偨偩偄偨僠乕儉偵偍抦傜偣偟傑偡丅
- 仠庡嵜摍
嫟丂嵜 悈拞儘儃僐儞悇恑夛媍丄乮撈乯奀梞尋媶奐敪婡峔丄乮幮乯擔杮慏敃奀梞岺妛夛丄IEEE/OES擔杮巟晹丄MTS擔杮巟晹丄僥僋僲僆乕僔儍儞丒僱僢僩儚乕僋丄Office of Naval Research Global (ONRG) 嫤丂巀 僉儎僲儞嵿抍 屻丂墖
乮梊掕乯搶嫗戝妛惗嶻媄弍尋媶強奀拞岺妛僙儞僞乕丄搶嫗戝妛奀梞傾儔僀傾儞僗 嫤丂椡 傾僋傾儌僨儔乕僘丒儈乕僥傿儞僌 幚峴慻怐 悈拞儘儃僐儞inJAMSTEC幚峴埾堳夛乮悈拞儘儃僐儞悇恑夛媍乯媦傃JAMSTEC