| 競技順 | 所属 チーム名 | ロボット名 | 説明 | 画像 |
| 一般01 | 九州工業大学 TEAM ILAB |
DaryaBird 長さ1.0m、30kg、自律型 |
小型のシステムであり,簡単に運搬可能.パンチルト可能なカメラを搭載しており,環境調査や防波堤等の保守・点検に用いる事が可能.AUV(自律行動)/ROV(人による操作)を変更可能であり,幅広いミッションに対応可能. 画像情報に基づくナビゲーション(ライントラッキング,ブイドッキング,自己位置同定)やタンカー等の大型艇を想定した船底掃除(反力制御,自己位置同定,経路計画)といった用途への応用を想定している.説明 |
 |
| 一般02 | 日本工業大学 チーム・アミアン |
ウンディーネ 長さ200 cm、50 kg |
大出力推進装置・大型船体で、ソフトウェアではなくハードウェアの確立を目指します。 | |
| 一般03 | 増田製作所 Delphinus |
潜水管 Delphinus 長さ0.7m、30kg |
Delphinusは、淡水域のイルカと並んで、高速追従観測を行うために開発されました。Delphinusの由来は、星座の【いるか座】、英語の【真海豚】(マイルカ科)にちなんでいます。 イルカは、通常は5km/hから11km/h程度の速度で泳ぎますが、短時間ならば45km/h程度と極めて高速な泳力を有すため、それに見合う強力な推進器を搭載した機体が必要です。強力な1軸ジェットポンプ推進を使用し、水中速力5ノット以上・水中ロボコン史上最速の機体を目指しています。説明 |
 |
| 一般04 | 慶應義塾大学 水中開拓チーム |
Mk-2 長さ0.5m, 15kg |
現在,当大学では水中ロボットの開発実績がない.そこで,今後の本格的な開発を目標に,学科横断的なチームを結成し,個々の要素研究が可能なシンプルな機体を開発している.説明 | |
| 一般05 | 東京工業大学附属科学技術高等学校 東工大附属エイロボットチーム |
Raybot 長さ0.8m、12kg、ヒレ推進 |
エイをモデルとし、ロボット本体をすべて自分たちで製作しました。ヒレにはカム機構を用います。尾ヒレを用いて上昇、下降します。説明 | |
| 一般06 | 九州職業能力開発大学校 KPC-AUV |
KPC-AUV2012 長さ0.8m、13.26kg、自律型 |
私たちが開発したAUVは,ブイタッチ・ランディング・ライントレース・ゲート潜りの競技用の機能を搭載した. 本年3月に出場したKPC-AUV2011は,照明などの影響により画像処理が不安定となることがわかった.今回はこの問題を解決するために水中ライトを搭載し,画像処理を安定化させた.また,傾斜センサと方位センサを搭載することで,細かな旋回を可能としている.説明 |
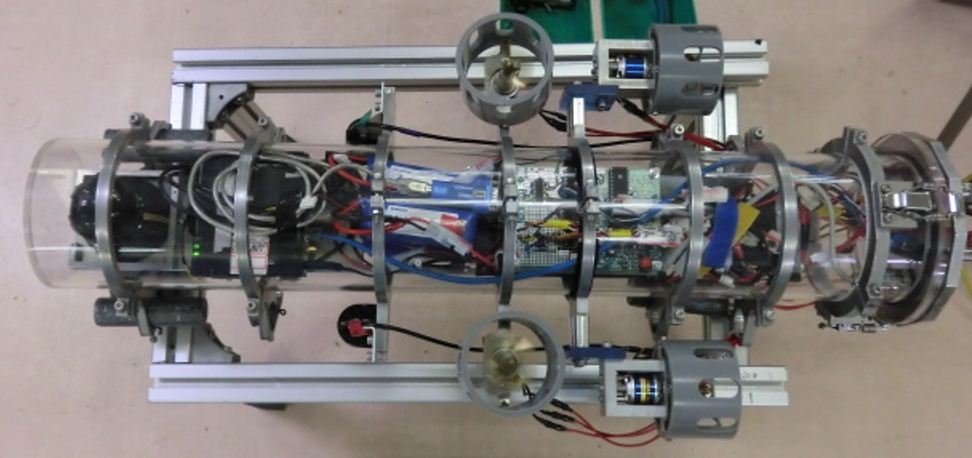 |
| 一般07 | 東京海洋大学 チームKOLABOT(代理) |
KOLABOT 長さ1m、重さ20kg、自律型 |
小型テストベッドAUV「KOLABOT」は,東京海洋大学海洋工学部近藤研究室で開発された1〜2人で実験を行えることをコンセプトとした機体です.全長1m空中重量20kgと水中ロボットとしては小型であるため運用にかかる手間が少なく,実験なども少人数で行えます.各種センサを搭載しており,デッドレコニングによる航行が可能です.現在,近藤先生が長期海外出張中のため,清水研が運用しています.説明 | 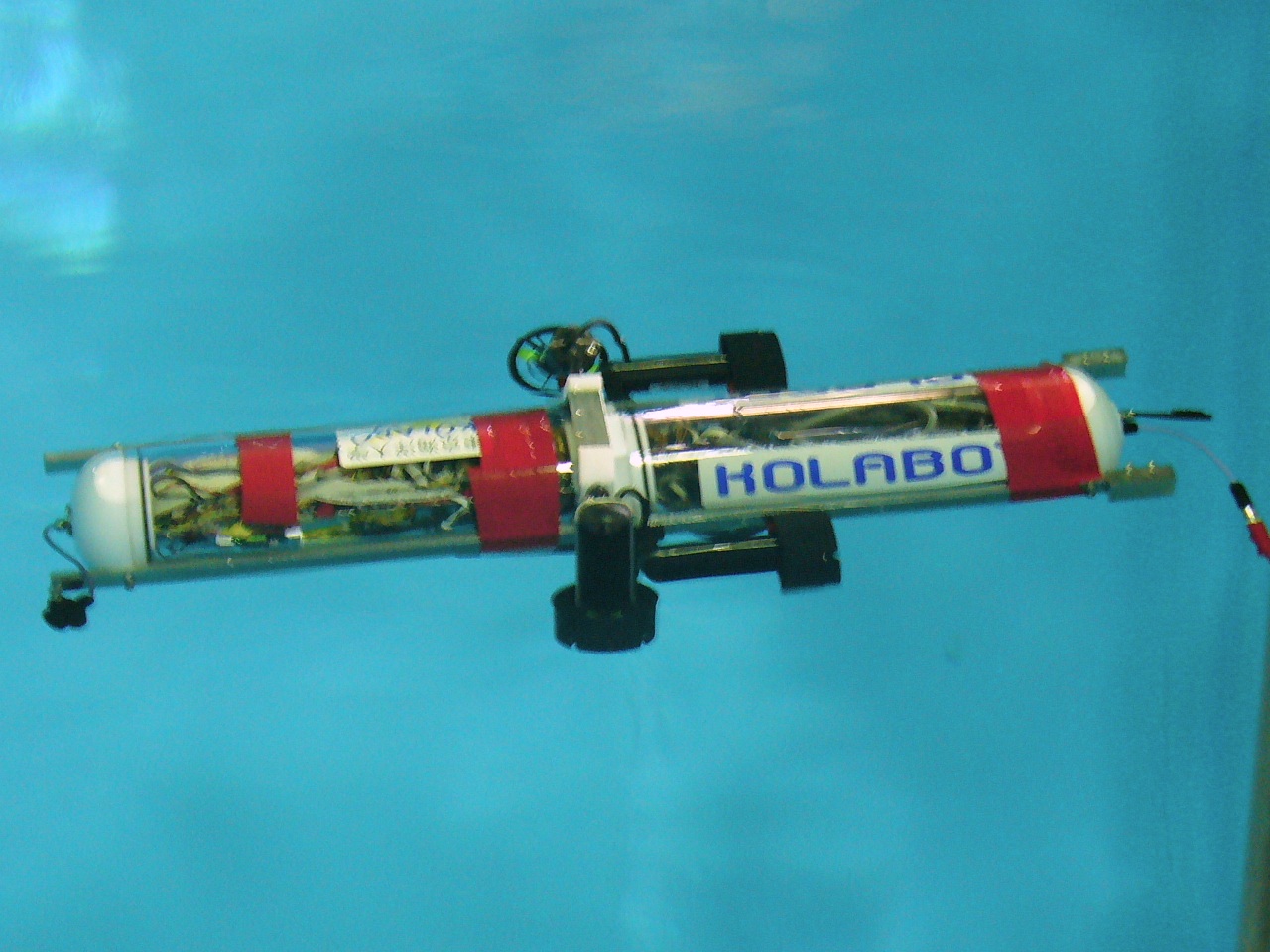 |
| 一般08 | 国立台湾大学 Groot |
Giant Fish 長さ0.9m、重さ19.96kg、ヒレ推進 |
Giant Fishは弾性ヒレ、浮力エンジン、コンパス、深度センサー及びコンピュータ映像用カメラ2台を備えている。推進エネルギーが節約できてロボットの運用時間を延長できる。 さらに高電力密度のリチウムイオン電池を使うことによって4時間以上運用できる。センサーは周辺環境を理解し、ミッション完了のための指示に従わせるのに役立つ。説明 | |
| 一般09 | 東京大学 チーム Yebis-URA |
YebisURA(エビスラ) 長さ0.8m、19.8kg、自律型 |
CPU: Let's Note CF-J10 Windows XP、スラスタ: x 4、自由度: サージ・ロール・ヒーブ・スウェイ、カメラ: 前方 x 1,下方 x 1説明 | 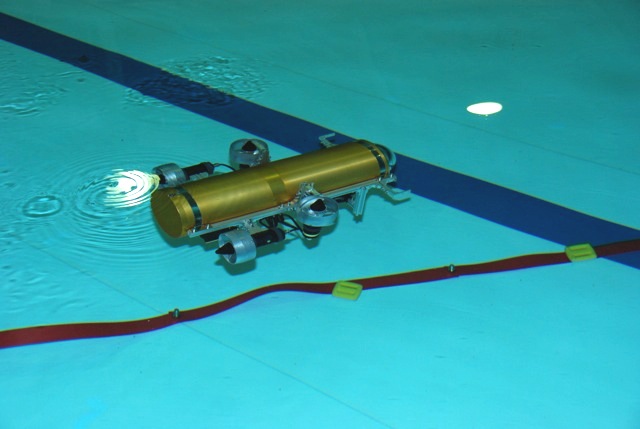 |
| 一般10 | 大阪市立大学 パワーシステムラボ |
FOCUS 全長28.5cm,重量500g、ヒレ推進 |
鯉をモチーフとした魚型のロボットで,連続遊泳時間は5時間以上,また物体追跡機能を搭載した超小型・軽量のアクアバイオロボットです.以前に比べて潜水能力がアップしました.説明 |  |
| デモ01 | 千葉大学大学院工学研究科 RGS |
NAIBU FLOW 長さ0.25m、重さ1kg |
内部流れを利用して、姿勢制御を行うロボットです。方向を変更する際、周囲への乱れが少ないことが特徴です。 | |
| デモ02 | 東京大学生産技術研究所/増田製作所 水中ロボバトル実現チーム |
プローブ魚雷・ランチャー 長さ0.4m、重さ0.3kg |
陸上ロボコンにあって水中ロボコンに無いもの、それは「バトル」の要素です。しかし殴り合いはメカが複雑になりすぎますし、かといって体当たりするわけにもいきません。そこで我々は一台2000円程度で製作できる、簡易なプローブ(小型魚雷)の開発に取り組んでいます。ロボットを問わずに装着可能で、射程距離は5m程度を目指しています。完成したら製作方法を公開する予定です。説明 | 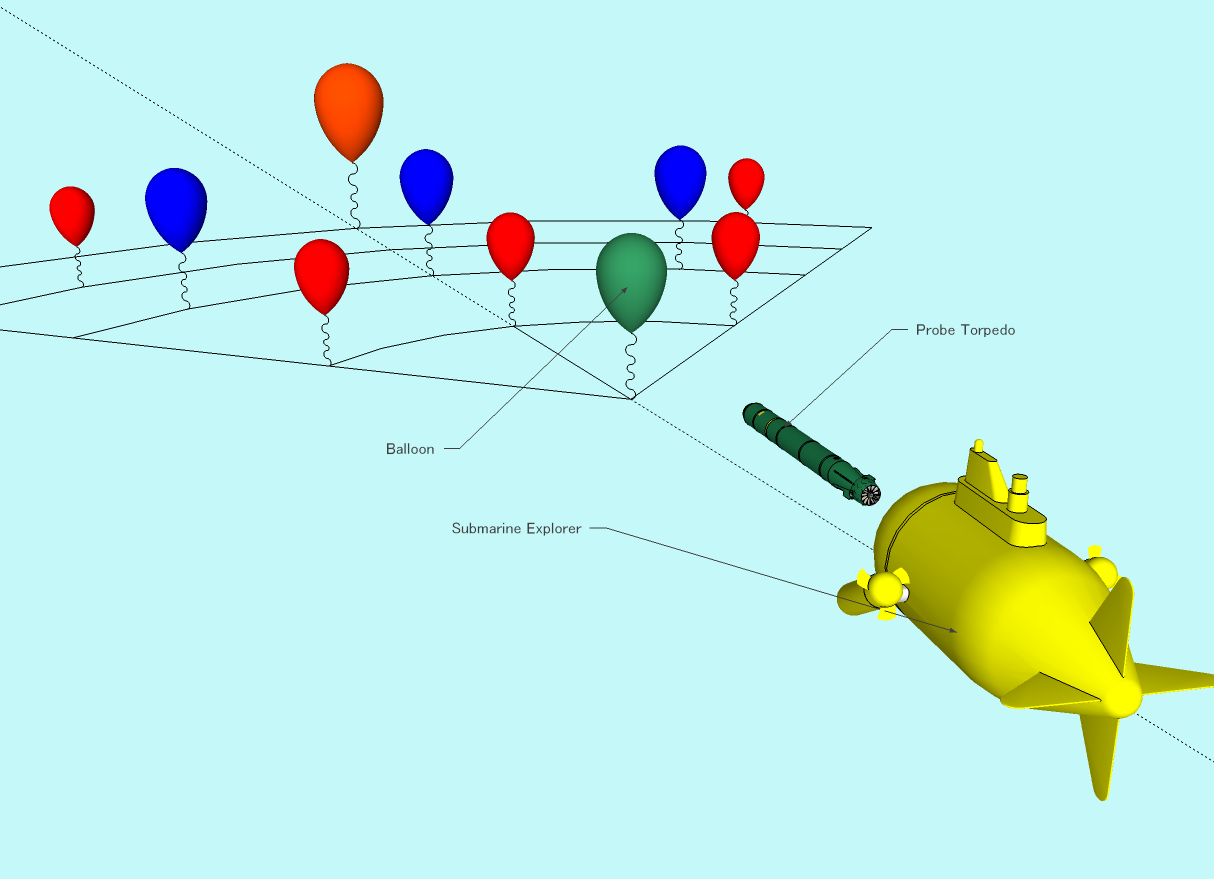 |
| デモ03 | O.R.E |
VideoRay Pro3GTO 長さ0.35m、4.8kg、市販 |
多目的小型ROV(世界最多生産) マニュピュレーター 小型測位装置SBL スキャニングソナー搭載。体験操縦で協力 |  |
| デモ04 | 水中ビークルフリーミーティング アクアモデラーズ |
水中ビークル工作事例と水中パーツ紹介
|
・塩ビパイプ製ROV”ENB-03”:今回の高校競技部門向けに開発。低予算で簡単に製作可能。ラジコン操縦だが、有線により脱着式水中カメラでモニターしながら電波の届かない水深での操縦も可能。 ・ペットボトル製水中グライダー:小中学生向け。無動力。任意の形状の翼型に交換可能。釣り糸で操縦及び回収を行う。 ・2chラジコン”潜水Q”:中高生向け。2chで自らが回転して潜水するラジコン。 ・AUV試験機:本体は塩ビ管。今は手動操縦だが、搭載カメラの画像をPCに飛ばし、画像認識を行い自動操縦するためのインターフェースを備えている。 ・空き缶回収潜水艇:小学生向け。ラジコン潜水艦でプールに沈んでいる空き缶などを回収。 ・水中パーツ:灯油ポンプ改造水中ジェット、自動深度安定装置/自動水平安定装置ほか | 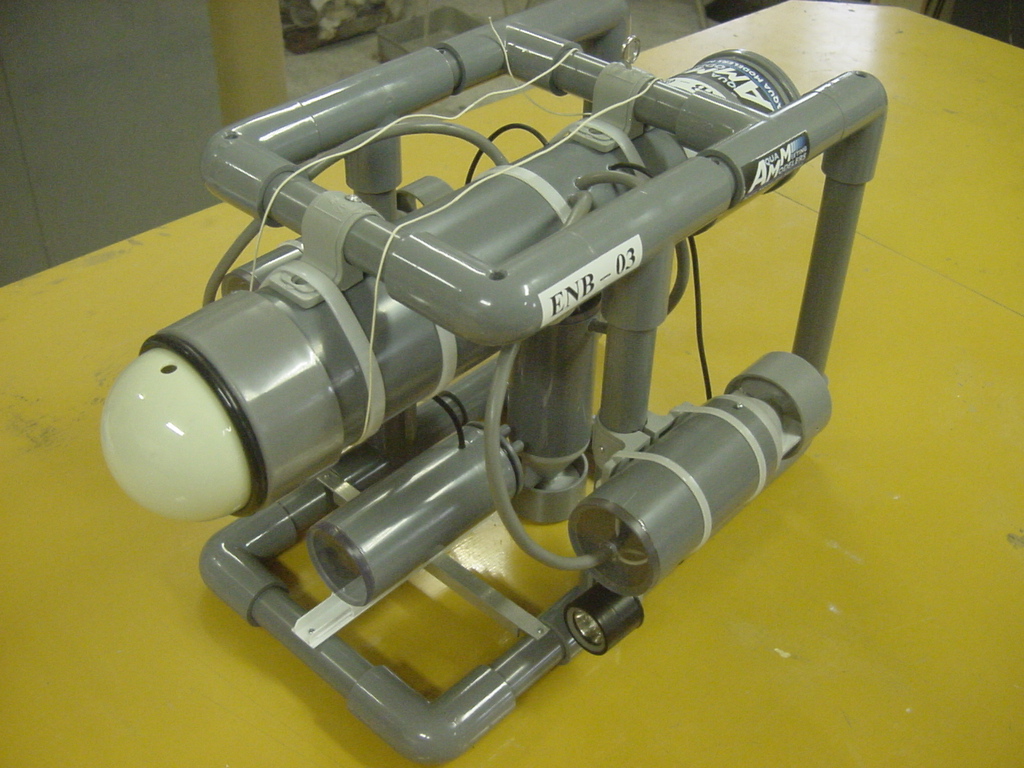 |