参加グループリスト:出品作品
(参考)水中ロボットのいろいろ2008年10月21日更新
●自律型無人機AUV
| 区分 | 作品名 | 製作者 | 作品紹介 | 要目 |
| 競技 | TUNA-SAND | 東京大学生産技術研究所 浦研究室 中谷武志(D3)ほか |  沈没船の探索, 熱水鉱床の開発, 大深度での対象物への接近観測とサンプリングを目的とした自律型水中ロボット(AUV: Autonomous Underwater Vehicle)。実用機として1,500m耐深設計であり、「高精度な慣性航法装置」,「海底地形を参照した測位機能」,「潮流に対抗できる十分な推進力」,「ハンドリングとロバスト性を考慮したオープンフレーム構造」を備えています。これまで鹿児島湾、明神礁、ベヨネーズ海丘で計20回の潜航を行い、熱水チムニーの発見をはじめ、熱水活動の詳細な観測を行うなどの成果を挙げています。
沈没船の探索, 熱水鉱床の開発, 大深度での対象物への接近観測とサンプリングを目的とした自律型水中ロボット(AUV: Autonomous Underwater Vehicle)。実用機として1,500m耐深設計であり、「高精度な慣性航法装置」,「海底地形を参照した測位機能」,「潮流に対抗できる十分な推進力」,「ハンドリングとロバスト性を考慮したオープンフレーム構造」を備えています。これまで鹿児島湾、明神礁、ベヨネーズ海丘で計20回の潜航を行い、熱水チムニーの発見をはじめ、熱水活動の詳細な観測を行うなどの成果を挙げています。
| 全長110cm 幅70cm 空中重量240kg |
| 競技 | HAL urabo | 東京大学生産技術研究所 浦研究室 山田卓慶(M1)ほか | 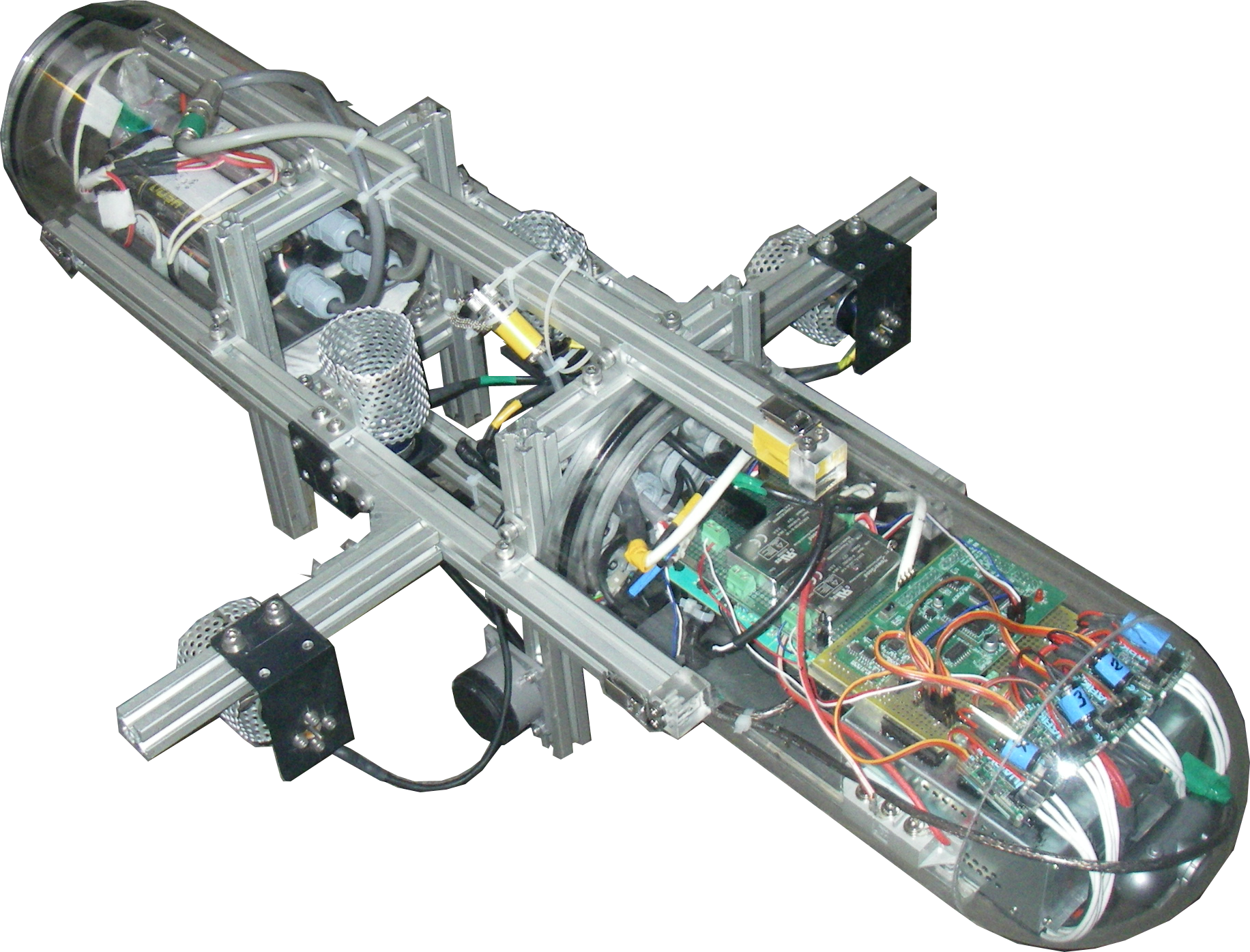 水中ロボット競技と教育目的で開発された自律型水中ロボット。HAL uraboは誰でも製作できる機能的なAUVをコンセップトとして開発した。デザイン、ハードウェアとソフトウエアの詳細は(デバッグ後)以下のブログにて公表する予定です。
水中ロボット競技と教育目的で開発された自律型水中ロボット。HAL uraboは誰でも製作できる機能的なAUVをコンセップトとして開発した。デザイン、ハードウェアとソフトウエアの詳細は(デバッグ後)以下のブログにて公表する予定です。http://www.halurabo.blogspot.com/ センサはUSBカメラ2台、方位センサと(株)本多電子と共同開発した水中ロボコン専用4方向の音響センサを搭載する。スタスターと電池はラジコンパーツを利用し、アクリルの耐圧容器にはコネクターを使わず、低コストな貫通ペネトレータを用いる。低コストと作りやすさを重視し、3ヶ月の開発期間と30万円以下の製作費を実現した。 皆さんもHALを作ってみて水中ロボコンに参加しましょう! | 空中重量15kg程度 |
| 競技 | T-pod | 東京大学生産技術研究所 浦研究室 船津拓也(M2) | クラゲを捕捉する目的でつくられたユニークな遠隔操作型ロボット。本体搭載のステレオビジョンでクラゲを認識し、2基のスラスタを使ってターゲットに接近、クラゲを吸引して傷つけないように捕まえる。 | 高さ107cm 直径27.5cm 重量60kg 耐圧1000m。今回はデザーケーブルで電力供給して競技(40W以下) |
| 競技 | AquaBoxⅢ | 九工大石井研 江里口優(D2)ほか | 沿岸域における観測を目的として開発された自律型水中ロボットです。2,3人でメンテナンスや活動を行えるように小型・軽量となっている点が特徴です。ロボット前部にパン・チルト機構付きカメラ、下部に下方カメラを搭載していますので、周囲や水中構造物の観測に適しています。 流速センサや姿勢センサ、深度センサ、音響センサ等を駆使して周囲の状況やロボット自身の状態を把握します。6基の推進器(スラスタ)によって前後左右上下への並進や回頭を行うことができます。また、パイプフレーム中心の構造によってロボット形態の変更やセンサ等の追加を行うことができます。 さらに、2006年から毎年7月〜8月に行われる自律型水中ロボットの国際競技会に参戦(日本初にして唯一の参戦ロボット!)していて、少しずつ戦績を上げてきています。昨年は不慮の事故によって推進器が故障していましたが、見事、復活を果たしました! | 全長170cm、幅60cm、空中重量40kg、所要電力:外部ノートPC 150Wx2、バッテリー充電器200Wx1、安定化電源 200W x1、制御用モバイルPC 80Wx1 |
| 競技 | Twin-Burger | 九工大石井研 武村泰範(D2)ほか | 5基のスラスタにより、前後進、左右旋回、左右並進、潜航及び上昇、の4自由度を制御している。また、2機のカメラを搭載しており、前方及び下方を探査し、目標物を捜索、追従する。今年の3月には、奄美大島にて実海域における運動制御実験を行った。本ロボットを用い、モジュラー型自己組織化マップを用いた動特性の変化に追従する適応型コントローラの研究を行っている。 | 全長154cm 幅86cm 高さ54cm、空中重量120kg、カメラを用いた色認識方式、所要電力:制御PC:80W、サポートPC:80W、バッテリー充電器:50W |
| 競技 | KOLABOT | 東京海洋大学 近藤研究室 岡山健次(B4)ほか | 教育用自律型水中ロボットのプロトタイプとして開発しました。4つのスラスタで前後・左右・上下の直線運動と、旋回運動の4自由度を制御します。アクリルの耐圧容器は機能ごとにモジュール化して結合させることにより、容易に機能の追加または削除が可能となっています。本大会がはじめてのデビューとなります。 | 全長100cm 幅36cm 空中重量21kg |
| 展示 | PICASSO | JAMSTEC | "Plankton Investigatory Collaborating Autonomous Survey System Operon"の略。生物研究用に開発され、ハイビジョンTVカメラ、海中実体顕微鏡システムVPR(ビジュアル・プランクトン・レコーダ)等を搭載。光ファイバーによるUROVモードと、ハイビジョンTVカメラによる生物自動追尾モードを有する。今回は展示のみ。深海技術協会投稿文 | 全長200cm 幅80cm 高さ80cm 空中重量200kg |
●フリースタイル(アクアバイオ、グライダーほか)
| 区分 | 作品名 | 製作者 | 作品紹介 | 要目 |
| アクアバイオ | Amphibious Multi link mobile robot | 九工大石井研 松尾貴之(M1)ほか | ロボットの研究目標は生物模倣型のロボット制御システムの開発である。水陸両用多関節型移動ロボットで、制御にはCPGと呼ばれる生物の脊髄に存在するリズムジェネレータを用いている。複数のマイコンによる分散制御方式を採用している。希望する協競技種目:フリースタイル(アクアバイオ)、デモンストレーション方法:プールでのデモ。 | 全長220cm 幅15cm 空中重量12.8kg、デザーケーブル付 直流24V |
| アクアバイオ | 水陸両用ヘビ型ロボットACM-R5 | 東京工業大学 広瀬・福島研究室 山田浩也ほか | 生物のヘビを模して作られた水陸両用ヘビ型ロボットです.水中では0.8m/s程度で自在に泳ぐことができます.デモでは10分程度,泳ぐ姿をプールサイドなどから見ていただければ良いかと思います.そのとき,マイクなどありましたらロボットの説明もいたします. | 全長160cm, 幅15.0cm, 空中重量7.5kg、ラジコン40MHz-69、バッテリー充電器約30w |
| アクアバイオ | ペンギン型ロボット『メカ閣下』 | UE村工房 植村千尋 | 双葉電子工業製ロボット用サーボを使用したペンギン型のアクアバイオロボット。フリースタイル部門で実験を兼ねてデモができればと考えています。 | 全長45cm、幅45cm、空中重量1.8kg、2.4GHzゲームパッド型送受信機使用、充電器50W程度、安定化電源(ALINCO社製DM330MV)最大200W程度、ノートPC60W程度 |
| 水中ロボット | 水中ぶるクル(開発仮称) | 有限会社擬人機工藝 澤田 毅ほか | 水中ぶるクル(開発仮称)は、教材・ホビー用に開発中の水上、水中ロボットです。本体は小型サイズ、卓上の水槽での運用を想定しています。アクチュエーターには振動装置と慣性(反トルク)を使用しています。携帯電話のアプリケーションで移動を制御、または動作プログラム可能です。当日は原理試作品とモックアップ展示、パネルでの内容紹介を予定しております。 | 全長4.0cm以下、幅4.0cm以下、高さ2.0cm以下、空中重量50g以下、携帯電話からの赤外線による制御データ送信、ノートパソコン 1台、携帯電話 2台、すべて充電済み、もしくは別途バッテリーを使用する予定。 縦200mm 横200mm 深さ50mmの水槽を使用 |
| 水中ロボット | リサイクル水中ロボ「オロチ」と「魚」 | 岡山商科大学付属高等学校 工業技術同好会 高1近藤祐一、指導教諭 小山 実 | ペットボトルを教育的に利用できないかとアドバイスをして、1軸と、2軸方向に変化するものを製作することができました。ペットボトルの厚さ、材質等を考えつつ、今後の応用に期待がもてるものです。中を抜いたのは、水深を考えてのことです。今までの水中ロボットでは、パイプ(?)に各種のセンサーを取付けて、潜らせたことはないものばかりです。この方法だと、センサー類だけの水圧etcの対策を考えればいいのではないかと考えました。 今後は、アクリルパイプでの水中ロボット(潮流電源)での活用も考えています。 有線での水中ロボット「魚」も参加。 | |
| ROV | AnchorDiver | 東京工業大学 広瀬・福島研究室 Huang, Ya-Wen(D2)、上田紘司(M1)ほか | 長期間にわたり潮流のある海底上にテザーにより係留し、自律して観測を行う海中ロボットの開発を目指しています。1つのスラスタ、水平・垂直舵を用いて移動します。 | 全長83.0cm、幅 48.4cm、高さ 39.2cm、空中重量10.3kg、ラジコン72MHz、バッテリー充電器約30w |
| グライダー | 主翼独立制御型水中グライダーALEX | 大阪府立大学 有馬研究室 | ラジコン使用せず | |
| グライダー | ペットボトル製水中グライダー DeepDiver | JAMSTEC西村 | ペットボトル、プラバン、低発泡塩ビなどの身近な材料を用いた水中グライダーの工作事例紹介と翼型の違いによる滑空性能比較 | |
| 共通基盤 | 水中電波とその応用 | 鹿児島大学竹内研究室 宮薗慎一(M2) | これまで行われてきた水中の電磁波伝播に関する研究の歴史や経過のようなものをまとめた冊子を出展・配布し、それに伴って私自身の修士論文研究のテーマであります、「淡水中の電磁波伝播に関する研究」のちょっとした紹介を行いながら、参加者の皆様と交流を図れればと考えています。 |
●ROV競技・体験操縦
| ROV | キュー・アイ | ROV競技および体験操縦用に4台を提供。 | 消費電力400W/台 | |
| ROV | ROV競技出場 | 岡山県立倉敷工業高校 | 倉工チャレンジャー(電子機械科3年、石森君、渡邉君) | |
| ROV | ROV競技出場 | 東京海洋大学近藤研究室 | Smax(ナガヤマさん、スエカネさん) | |
| ROV | ROV競技出場 | 東京海洋大学近藤研究室 | ササキさん、アダチさん、さかなクン | |
| ROV | ROV競技出場 | アクアモデラーズ・ミーティング | 雲山さん、RNさん | |
| ROV | ROV競技出場 | Adrian | ||
| ROV | ROV競技出場 | 並木チーム | ||
| ROV | ROV競技出場 | ザ・沈(オザワ、タケシマ) | ||
| ROV体験 | RTV | 東京大学生産技術研究所 浦研究室 | 体験操縦用に1台を提供。 | |
| ROV体験 | Explore | グローバル環境ソリュージョン | 商品紹介と体験操縦 |
●水中ラジコン
| 作品名 | 製作者 | 紹介 | 主要寸法、消費電力、バンド |
| 潜水Q_Square(動画wmv) | 鈴木幹雄 | 前回持ち込んだ、船体回転で潜航浮上する潜水船の新型。現状ではテスト中。 | 全長40.0cm、幅40.0cm、空中重量1.2kg、充電済みバッテリーを2本持参予定、#02 |
| テルスター11号(動画wmv) | 今江 望 | 40年ほど前にコグレ模型から出されていたプラモデルをイメージして作ったRC潜水艇です。モーター、ラダー、エレベーターで3ch、ダイナミカルダイブ方式 | 全長28cm 幅17cm、空中重量0.5kg、充電器30W 以下、67/69/71(現地交換は困難) |
| トリエステ(動画wmv) | 今江 望 | いまだに破られていない有人深度記録を持つトリエステの初期型を1/35でRC化。左右のモーターとポンプバラストで3ch、ポンプはチューブポンプを使用 | 全長43cm 幅10cm、空中重量2.6kg、67/69/71(現地交換は困難) |
| USS.ENTERPRISE NCC-1701-A(動画wmv)、(予備:宇宙戦艦ヤマト(動画)) | Y_D_Dock | 映画スタートレックに登場したConstitution級のStarfleet所属の宇宙船です。航行方式は3D-ACTIVE方式で一つの偏向ノズルで、速度、上下方向、左右方向のすべての走行制御を行っています。パワーユニットはバスポンプを利用しています。 | 全長90cm 幅41cm、空中重量3kg、61番 |
| アクアレーサー「Delta Flyer」 | Y_D_Dock | アクアレースに出場 | #61(#69に交換可能) |
| 海底軍艦「轟天号」(動画wmv)、(予備:イー19号) | Taka袋 | 船体の材質はソフトビニールで、強度的に弱く、温度変化により変形しやすい特性がありますが、ある程度の補強を行って、なんとか走行できる物になりました。 | 全長約60cm、幅約10cm、 #04 |
| ノーチラス(動画wmv)、アクアレーサー「痛レーサー」、ミレニアム・ファルコン号 | ヒロ。 | ノーチラス:バラスト式ラジコン潜水艦。障害物競技、浮沈競技、体験操縦に出場。痛レーサー:アクアレースに出場 | ノーチラス:全長77.4cm、幅29.0cm、重量7.7kg、バッテリー充電器、#75、痛レーサー:#63(どれでも交換可能) |
| 伊−601富嶽(動画wmv)、 | J.Amano | 「紺碧の艦隊」に登場する大型潜水艦でFRPで製作。障害物競技に出場。 | 全長 112cm 幅 15cm 重量 4450g。61、63、65、69、71、73、75、ジュニア707(#10固定) |
| サンダーバード4号(動画wmv)、ジュニア707 | J.Amano | 「サンダーバード」に登場する救難用潜航艇でディスプレイモデルにメカを組み込みRC化。モデルは共にスクリュウーを使わない遠心ポンプ式ウォータージェット推進を採用しています。障害物競技に出場。ジュニア707:体験操縦用 | 全長 27cm 幅 10.8cm 重量 480g。61、63、65、69、71、73、75、ジュニア707(#10固定) |
| アトランティス(動画wmv) | RN | NASAスペースシャトル・オービターの5機のうちの4番機 (OV-104)、 Revell社の1/72プラモデルを改造、推進機関は灯油ポンプ改造ハイドロジェット | 全長63cm、全幅35cm、空中重量1.3kg、61・63・65・67・69・75ch |
| おやしお(動画wmv) | RN | 海上自衛隊の潜水艦、Robbe社のキットを改造して製作。障害物競技に出場 | 全長103cm、全幅14.5cm、空中重量3.9kg、61・63・65・67・69・75 |
| UボートⅨ型 | RN | 体験操縦用 | 61・63・65・67・69・75ch |
| UボートVIIC | 雲山 | 第二次世界大戦において、ドイツ海軍の懐刀として地中海から大西洋を所狭しと活躍した歴戦の潜水艦。のプラモデル改造ラジコン。スケールは1/72。故有って今回は展示のみ。 | 水上排水量:753t、水中排水量:857t、全長:66.5m、全幅:6.2m、吃水:4.7m、全高:9.5m(※実物) |
| サブマリン707(動画wmv) | 吉川 博樹(かめきち) | 707のプラモをFRPで倍尺にしたモデルです。外径50mmのバラストタンク付きのWCTで動作させます。 | 全長=62cm 全幅=12cm 空中重量=1.47kg、#61〜75(現地交換は困難) |
| はるしお(動画wmv)、アクアレーサー「7-Eleven」 | 海人党 | はるしお:障害物競技に出場、7-Eleven:アクアレースに出場 | はるしお:#69固定、7-Eleven#73(#63、#65に交換可能 |
| アルファ級(動画) | 矢崎 | 大阪の模型店「キャプテン」さんのキットで、大型潜水艦模型です。内蔵されたバラストタンクで浮沈します。実艦は、1000メートル(?)までの潜行が可能です。障害物競技に出場 | #73固定 |
| ミゼットサブ(動画wmv)(予備:ガトー級)、はるしお改 | トム | ミゼットサブ:フランス製の小型RCでポンプ式のバラスとタンクを持っています。電源は6vのシールド・バッテリーです。障害物競技に出場。はるしお改:浮沈競技に出場 | ミゼット・サブ(65)、ガトー級(75)、はるしお改(75)、Jr707(65) |
| おやしお型、白イルカ/白鯨、ミゼットサブ/よみうり号 | トム | 体験操縦用 | おやしお型(#75)、白イルカ/白鯨(#67)、ミゼットサブ/よみうり号(#65) |
| ネプチューン改(動画wmv) | DEN | 台湾サンダータイガー社製 ネプチューン改(略してネプ改) 黄色いサツマイモみたいだった外観に手を入れ、少しは潜水艦っぽく見えるよう改造。浮上すると艦橋のハッチが開いて人形が顔を出すのがチャームポイント(笑)障害物競技、浮沈競技に出場 | #67(71,63,61に交換可) |
| よみうり号、アクアレーサー「フリッパー」 | RC艦隊 | よみうり号:体験操縦用、フリッパー:アクアレースに出場 | よみうり号(#73、#63、#65) |
出店者(予定含む)