参加グループリスト:出品作品
(参考)水中ロボットのいろいろ2007年4月11日更新
●ケーブル式ロボット(ROV)・その他
| ※ | 参加形態 | 操縦方式 | 所属(担当者) | 参加作品 | 画像 |
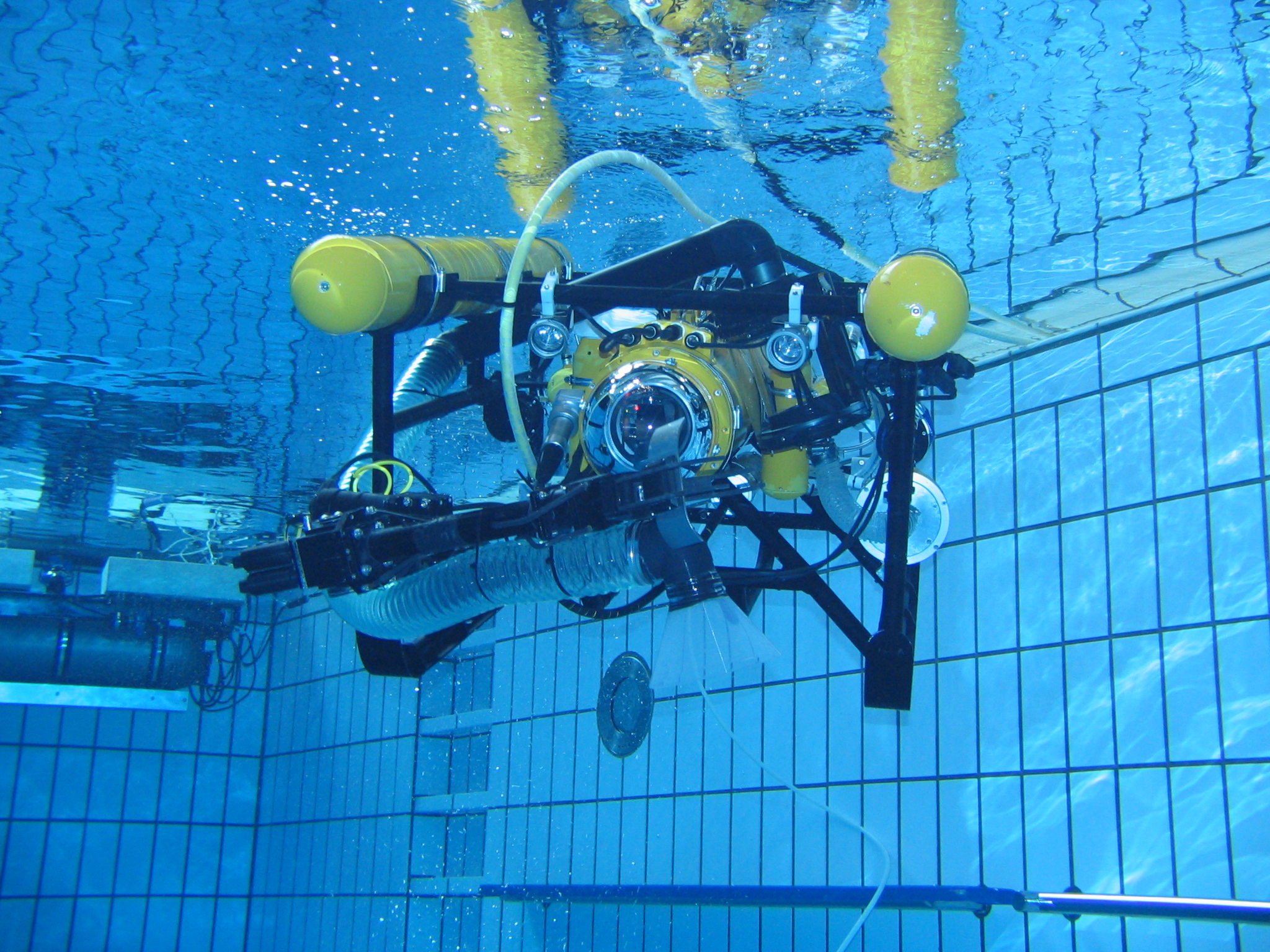
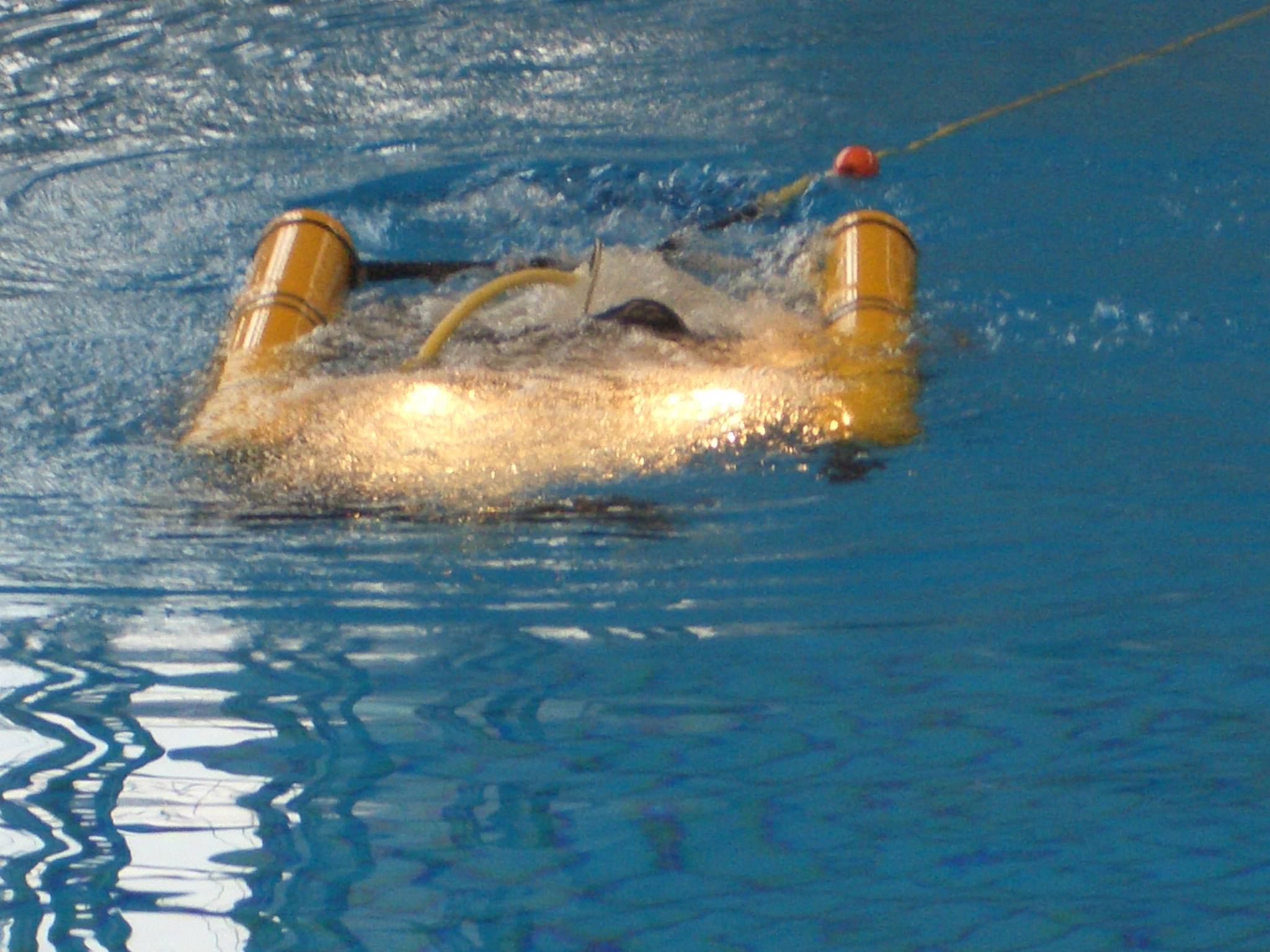
| A1f | 水中デモ | ケーブル式 | 広和株式会社 マリンシステム部* | 「KOWA MARINE LEO」:L:約1.1m×B:約76cm×H:約60cm、W=約70kg、交流200W(発電機持参) | 画像1/画像2/avi動画/mov動画 |
| A2p | 水中デモ | ケーブル式 | 日本海洋株式会社* 環境調査・測器事業部 | SeaBotix社製 超小型ROV「LBV150」(L:53cm×B:24.5cm、W=10.4kg。出展時間:14時頃~15時30分) | wmv動画 |
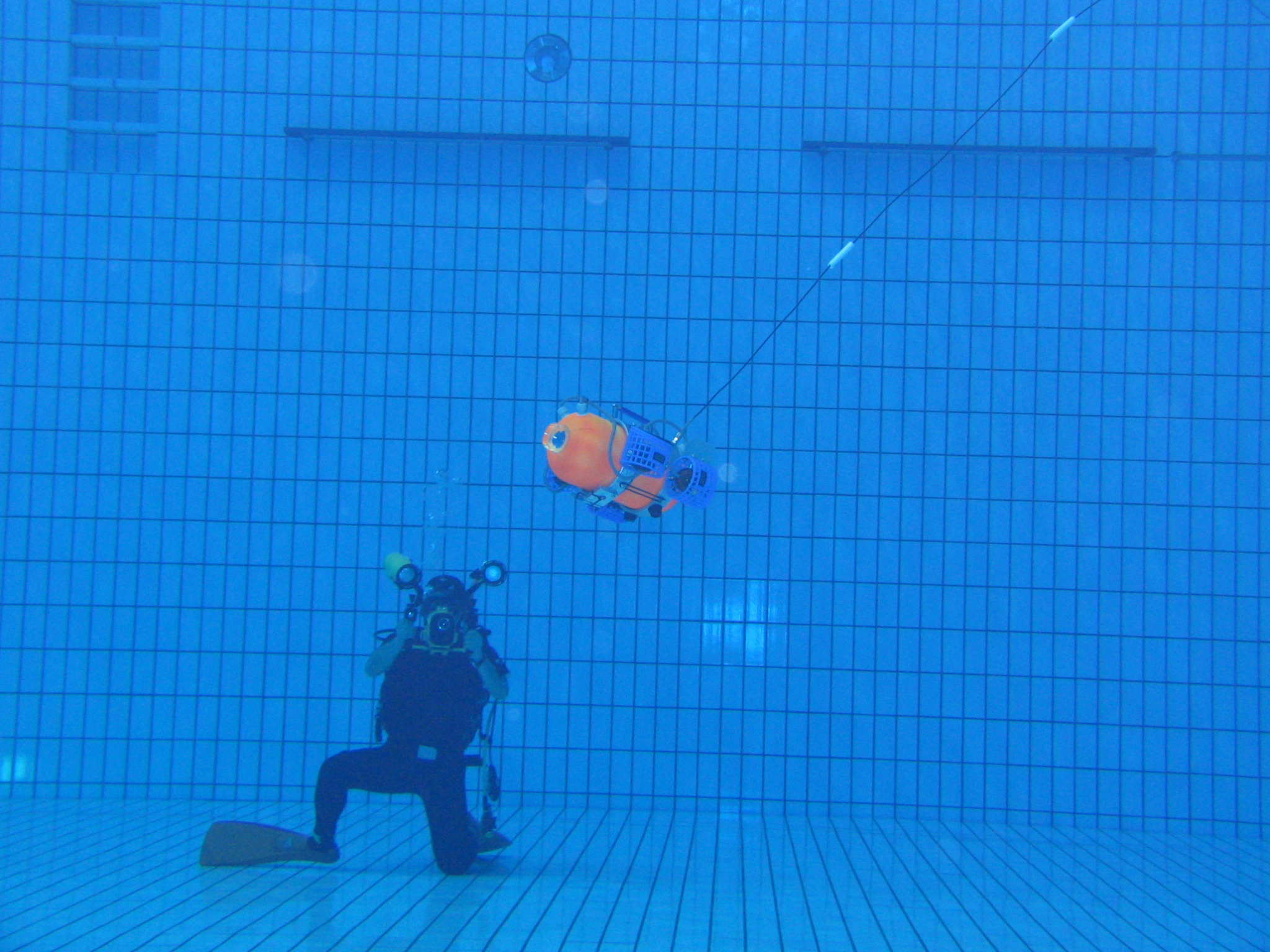
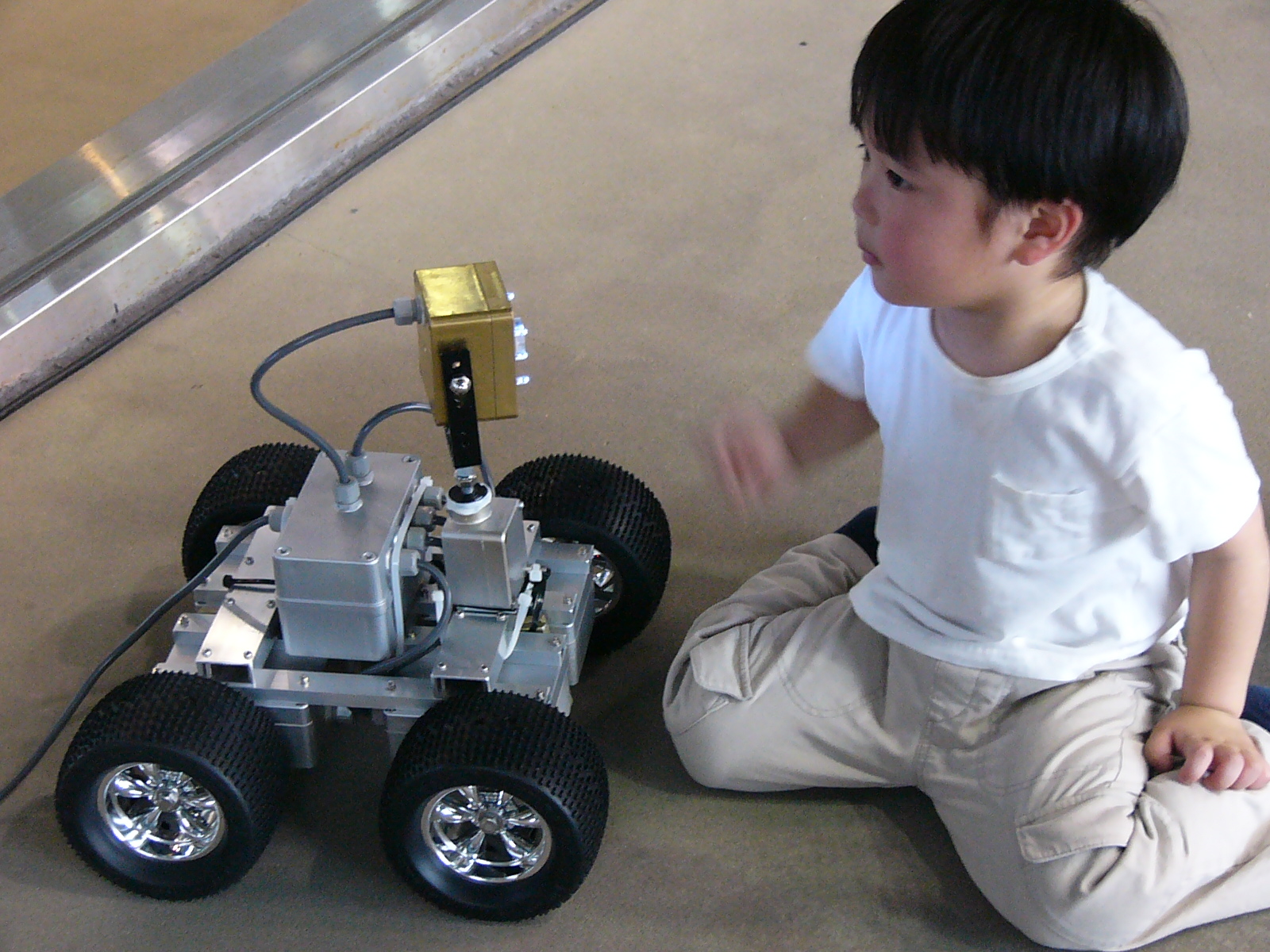
| A3p | 水中デモ | ケーブル式 | みずがめ | ROV「みずがめくん」:L:30cm×B:40cm、W=3kg。DC15V、海底走行ロボット「水中探査ローバー」:L:40cm×B:40cm、W=5kg。DC20V | ROV:画像1/画像2/wmv動画(12MB)/ローバー:画像/mov動画/wmv動画 |
| X1t | 体験操縦用 | ケーブル式 | 東京大学 生産技術研究所 浦 研究室 | ROV「RTV」(三井造船製) | 操縦風景 |
| A3t | 水中作業等 | - | (株)アクアスペース |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
●自律型水中ロボット(AUV)
| ※ | 参加形態 | 操縦方式 | 所属(担当者) | 参加作品 | 画像 |
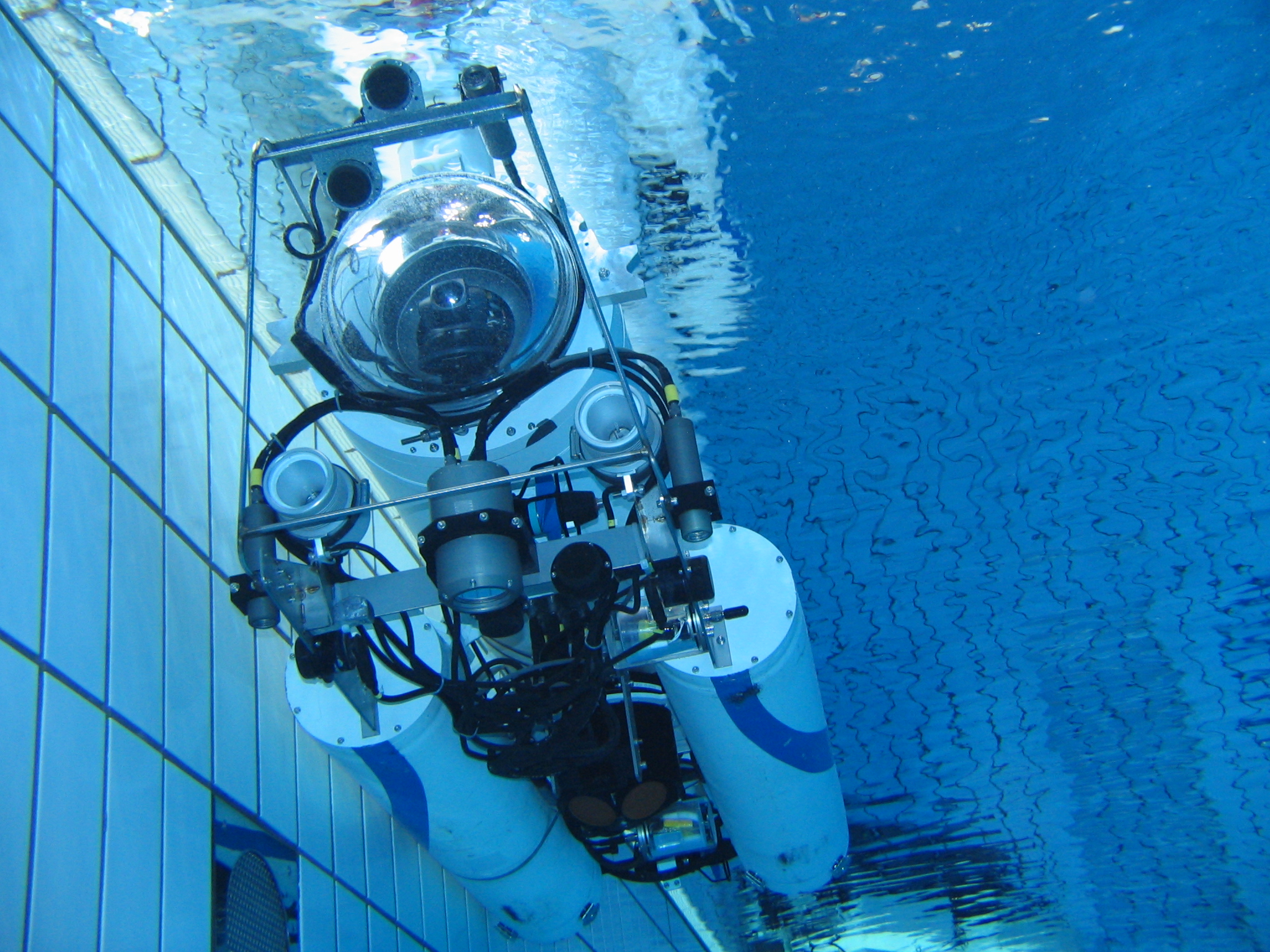
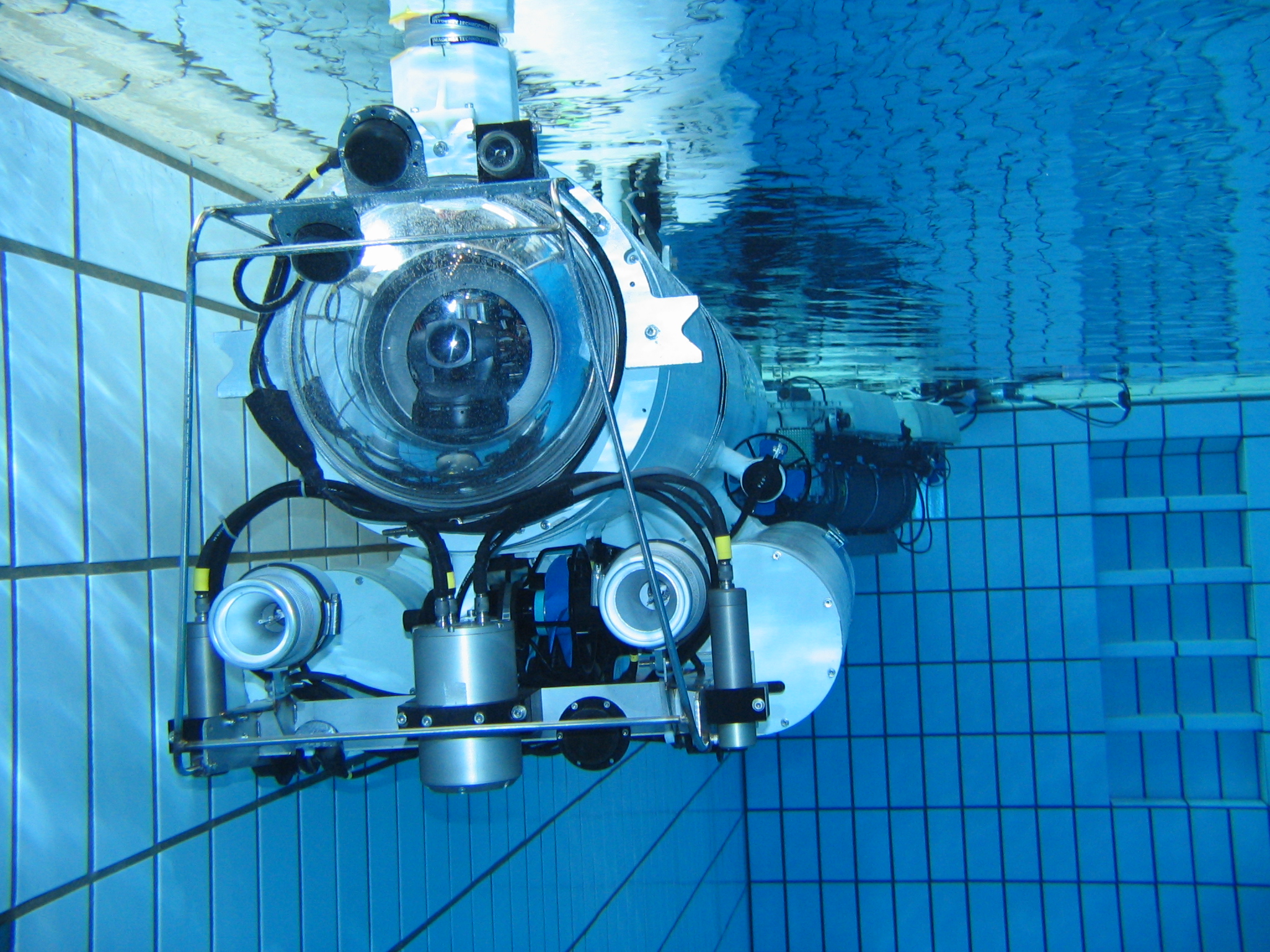
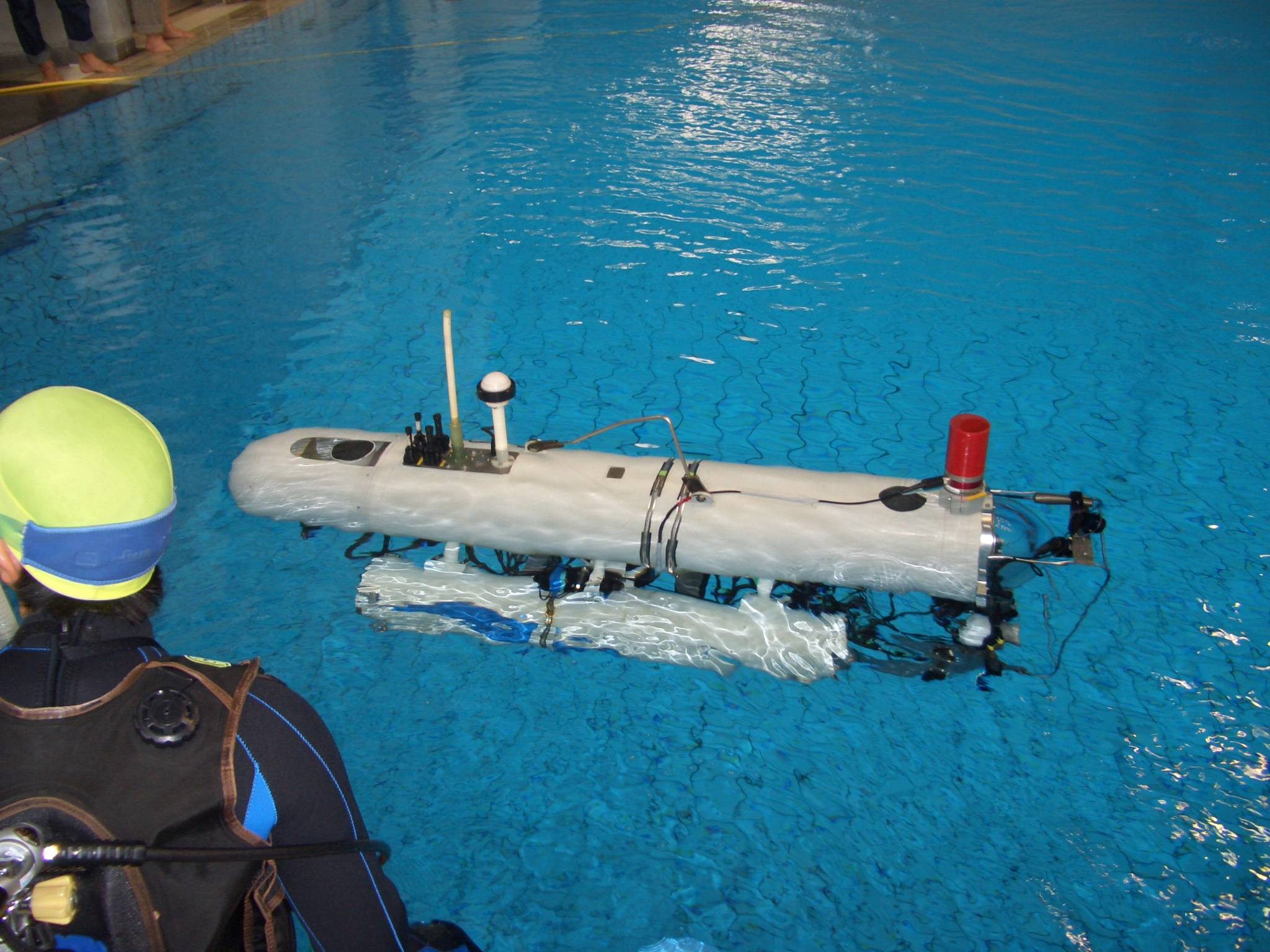
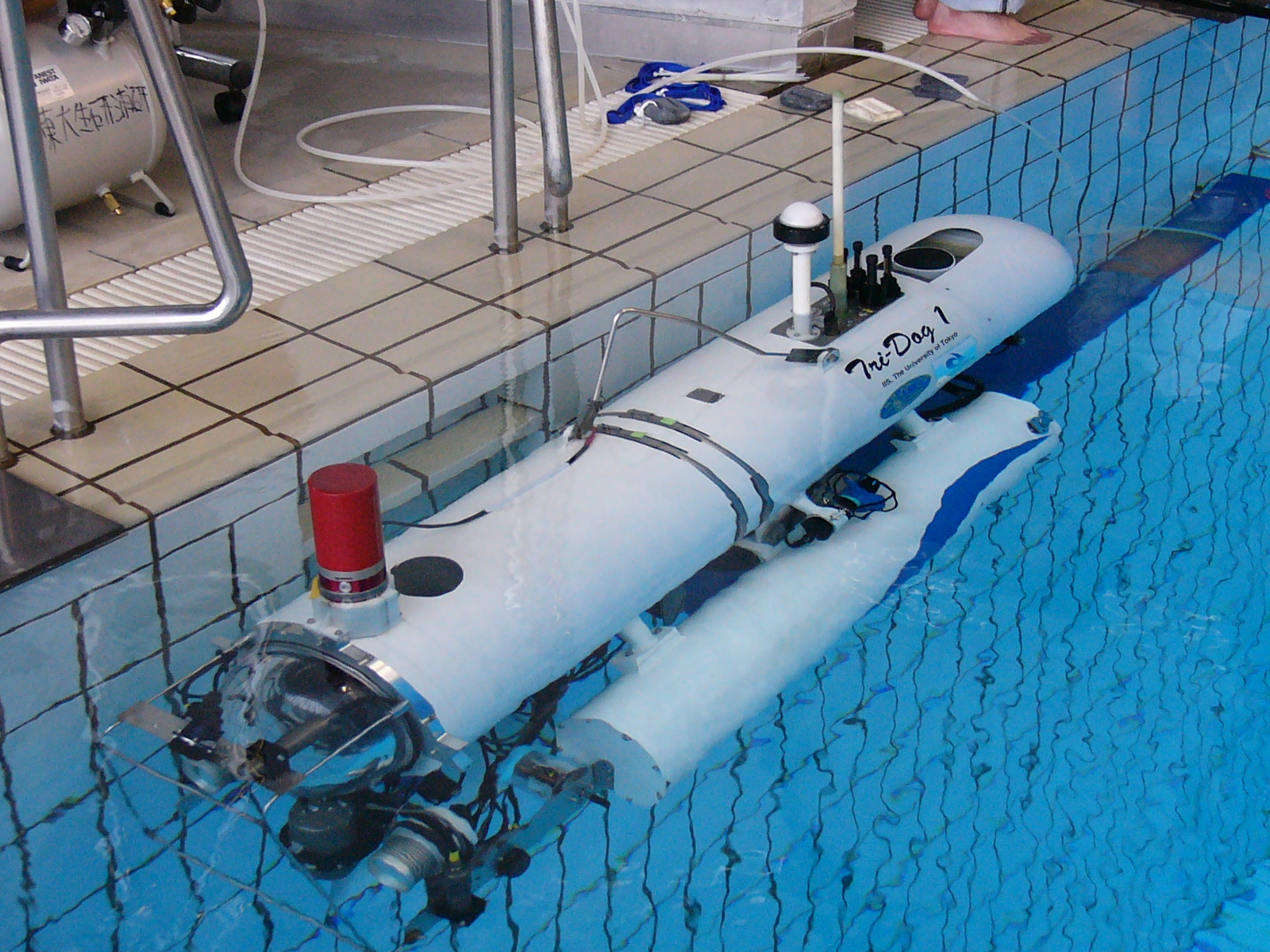
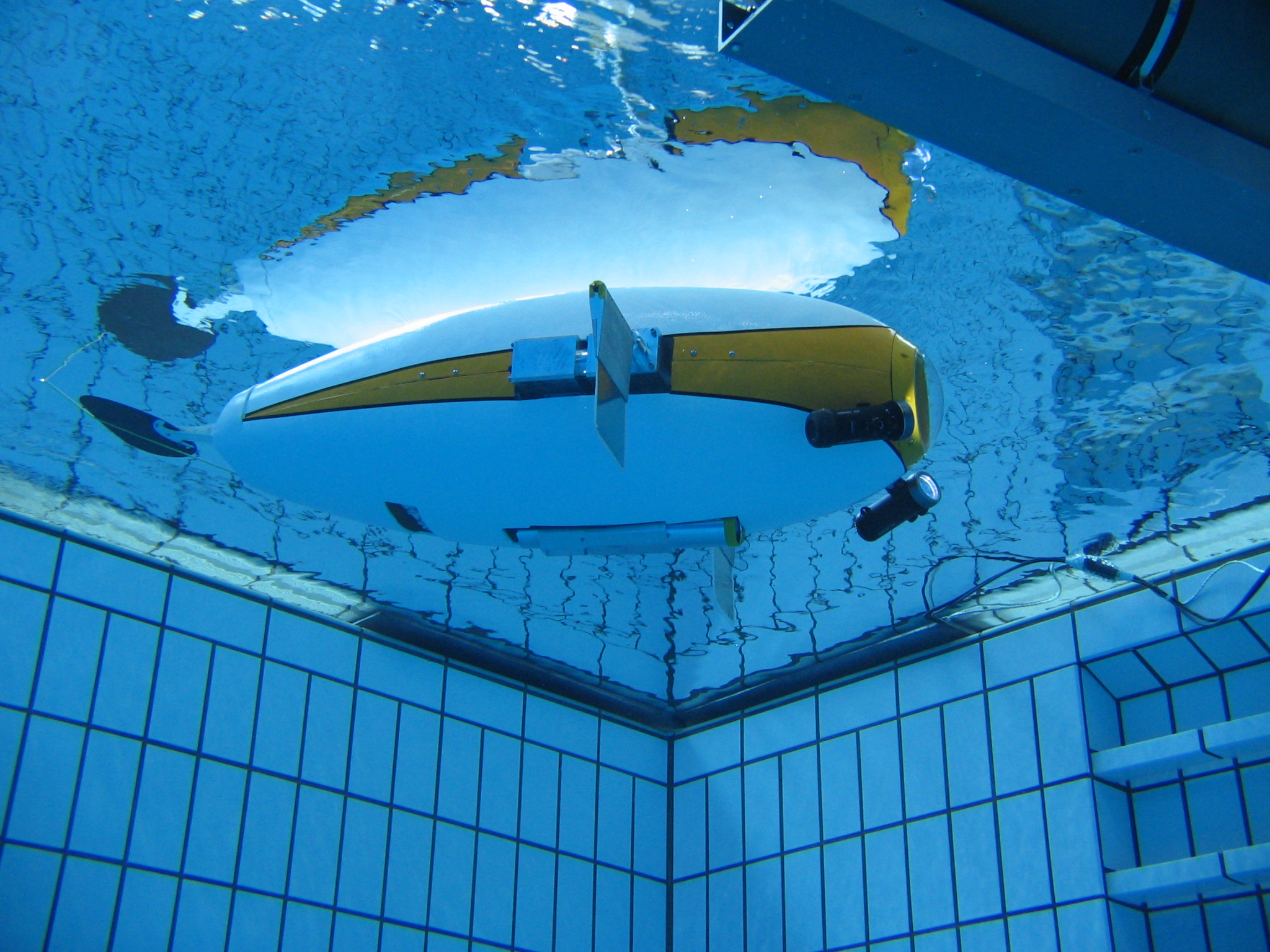
| B1f | 水中デモ | 自律型 | 東京大学生産技術研究所 環境海洋工学専攻 博士課程2年 巻 俊宏(浦 研究室)* | 「Tri-Dog 1」:L:1.8m×B:60cm、W=約180kg。1999年に東京大学生産技術研究所で開発されたホバリング型AUV。6台のスラスタによってサージ、スウェイ、ヒーブ、ヨーの4自由度を制御する。 センサーはドップラ式対地速度計(対地速度)、光ファイバジャイロ(方位)、姿勢方位基準装置(ロール・ピッチ)、障害物探知ソーナー(前、左右、下の合計6方向)、シートレーザーによる障害物探知装置(前1、下1)、プロファイリングソーナー(水平方向)を持つ。 釜石湾(2002~04)、琵琶湖(2005~)、鹿児島湾(2006~)などフィールドでの無索オペレーションの実績あり。 | 画像1/画像2/画像3/画像4/撮影風景/mov動画/wmv動画 |
| B2f | 水中デモ | 自律型 | 東京大学生産技術研究所/明治大学大学院理工学研究科 修士課程2年 真岩 傑(浦 研究室)* |
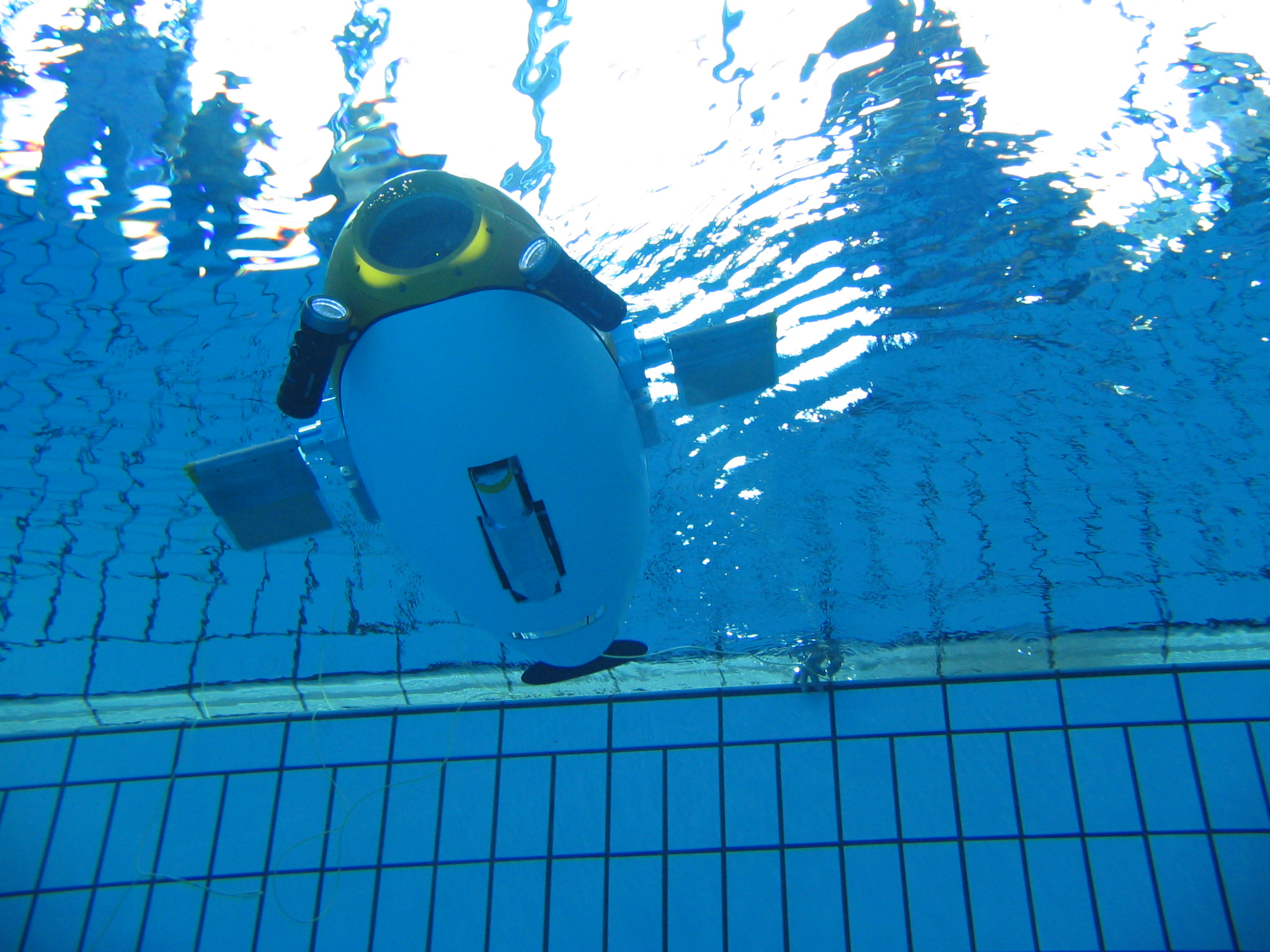
「Tam-Egg2」:L:1.30m×B:60.5cm、W=約112.5kg。2004年に東京大学生産技術研究所で開発された小型ホバリング型AUV。半自律型水中ロボットであったTam-Egg1の後継機にあたる。 4台のスラスタによってサージ、スウェイ、ヒーブ、ヨーの4自由度を制御する。またセンサーとしてドップラ式対地速度計(対地速度)、光ファイバジャイロ(方位)、姿勢方位基準装置(ロール・ピッチ)、圧力計(深度)、障害物探知ソーナー(前、左右、後の合計4方向)、CCDカメラ2台、画像処理専用コンピュータ(ビジョンセンサとして)を持ち、ステレオビジョンによる3次元位置計測が可能である。 沈没船内部などの狭空間内での自律観測を目標とし、現在は水槽実験を中心とした研究が行われている。 | 画像1/画像2/mov動画/wmv動画(12MB) |
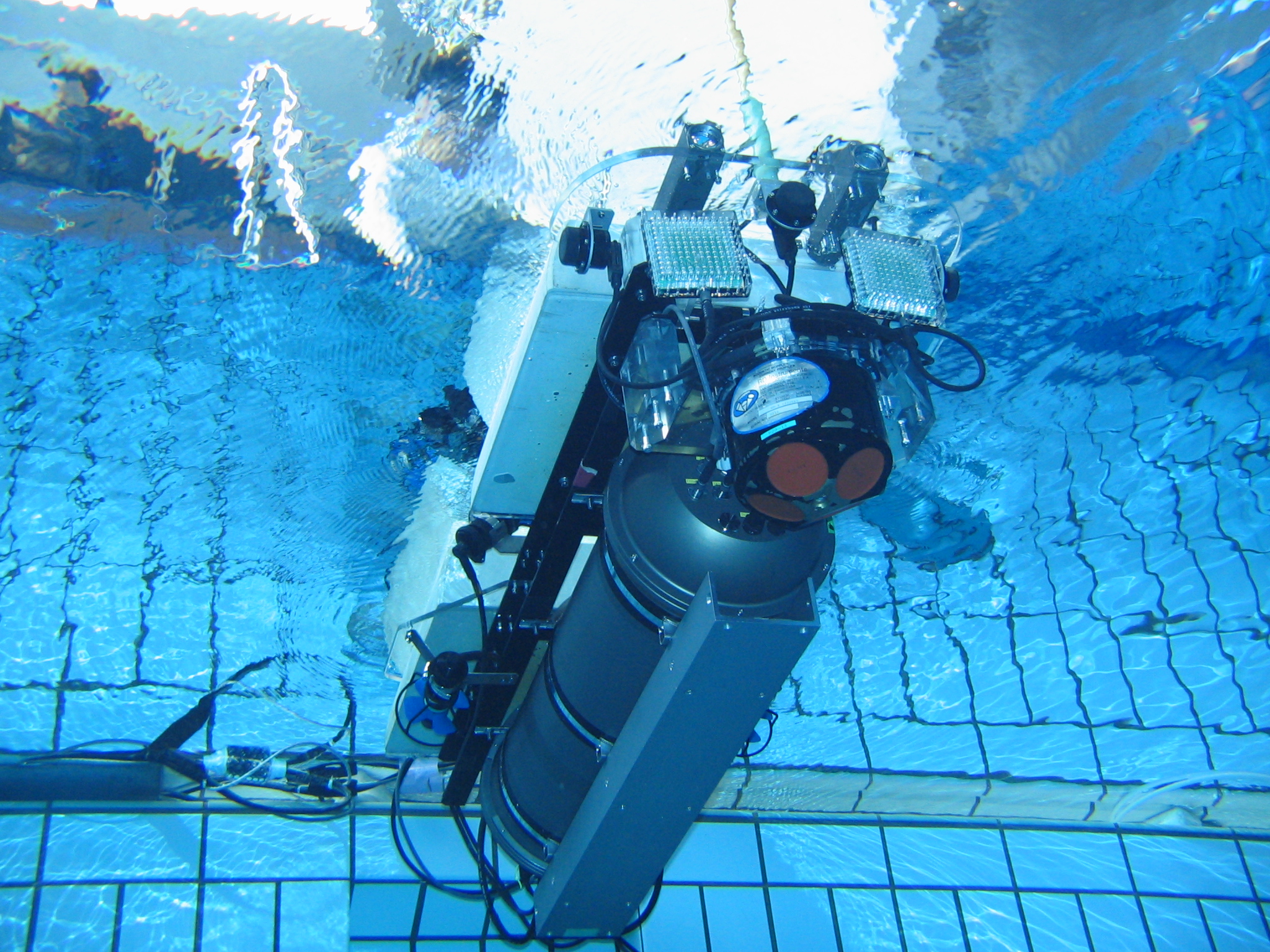
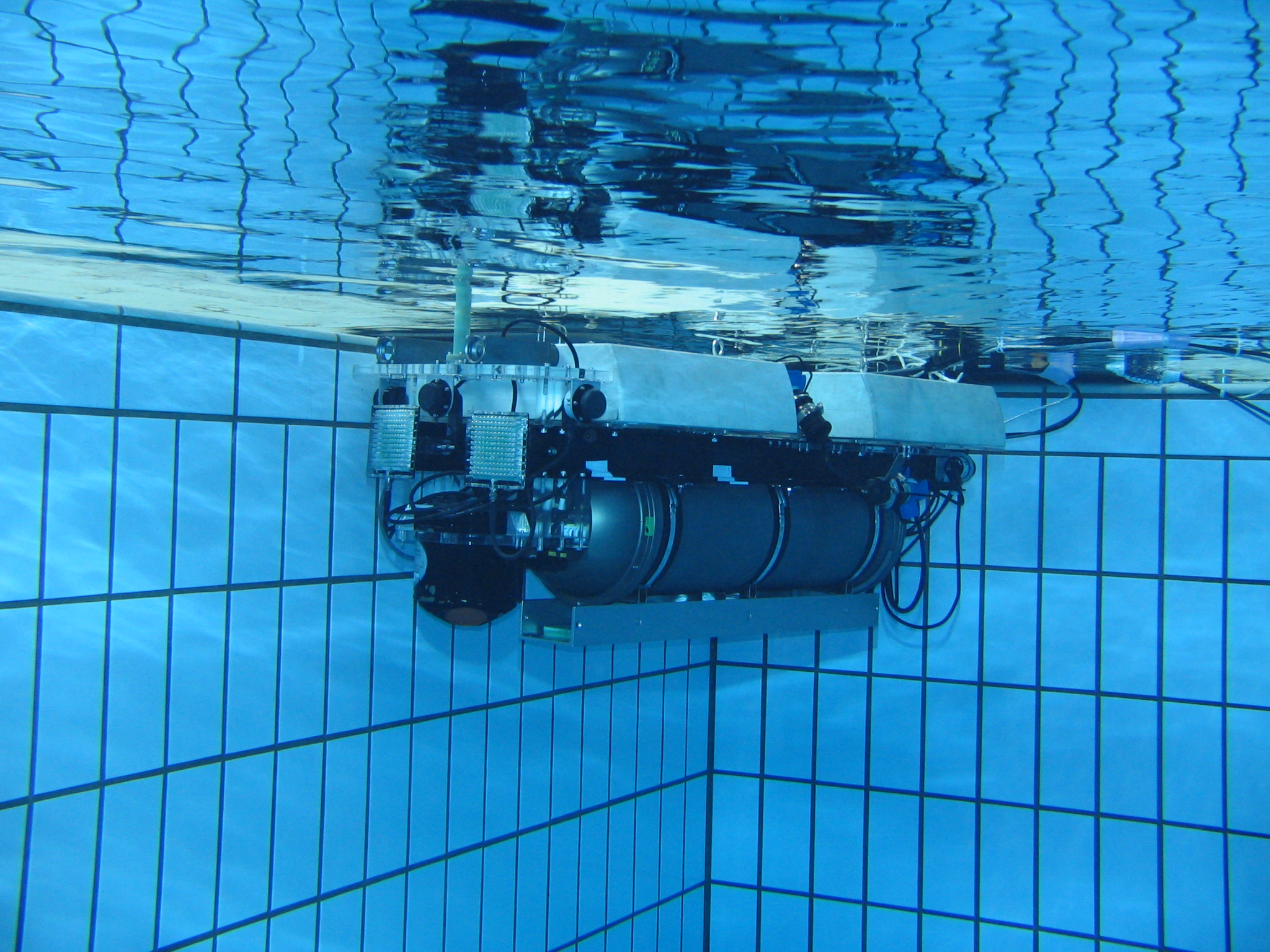
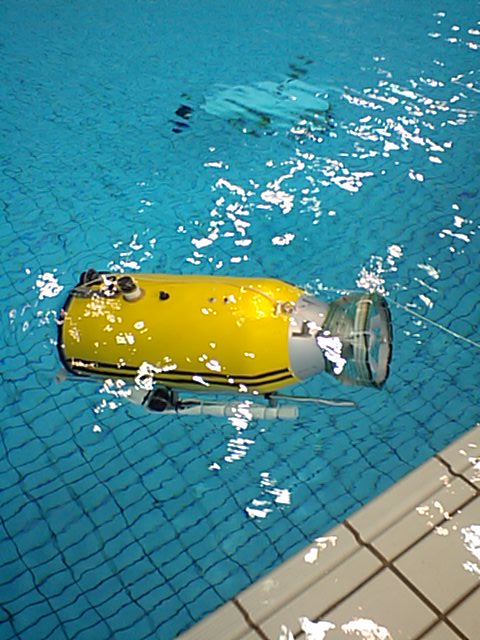
| B3f | 水中デモ | 自律型/無線 | 佐世保工業 高等専門学校 ロボットテクノス 長嶋研究室* | 「小値賀プロジェクト」:L:86cm×B:33cm、W=70kg。可変ベクトルプロペラ1個搭載したコンパクトな水中ロボット。これまで自律型で実海域、UROVで海洋観測、水中考古学調査を行った。 | 画像1/画像2/説明/mov動画/wmv動画(43MB) |
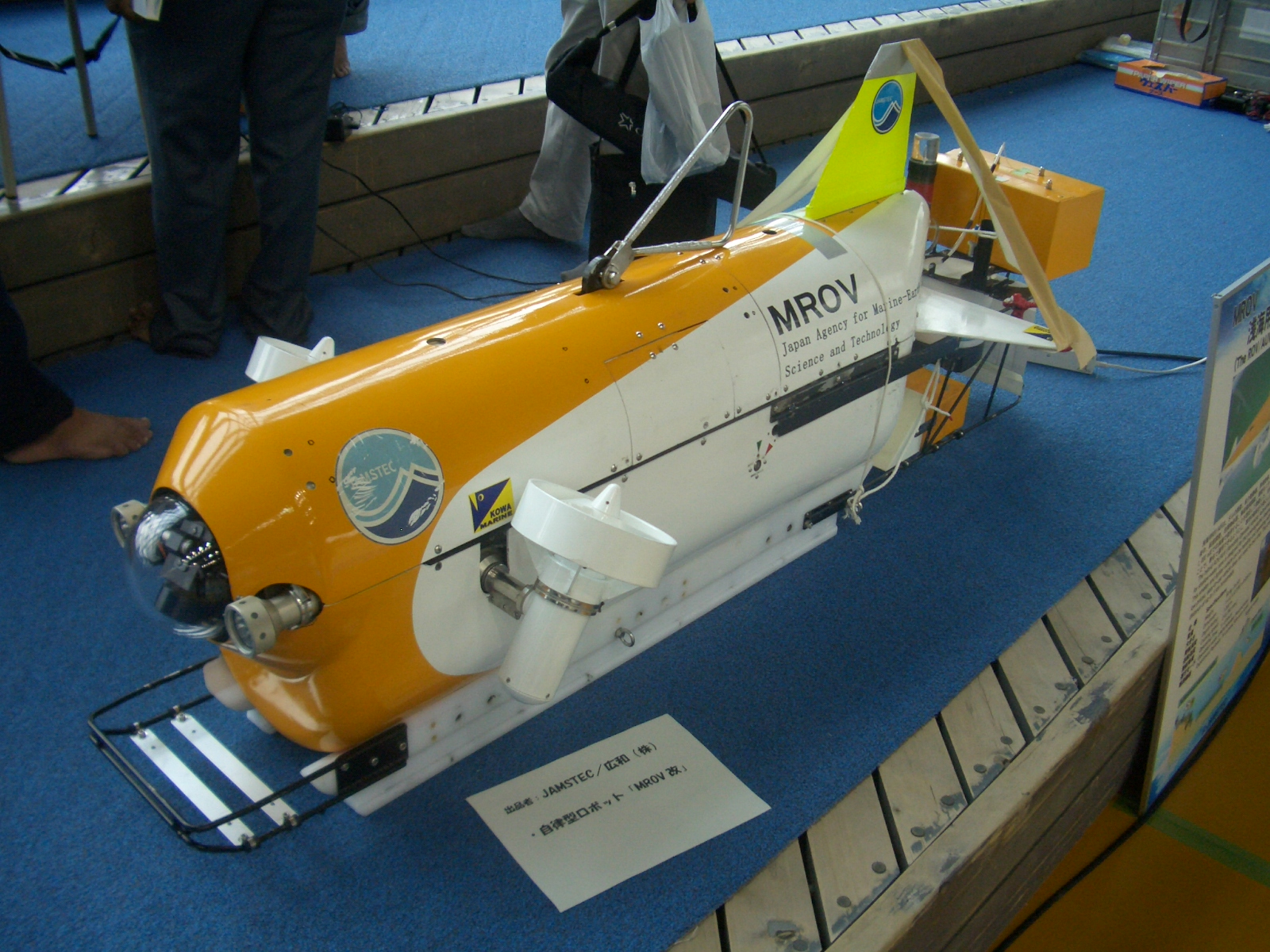
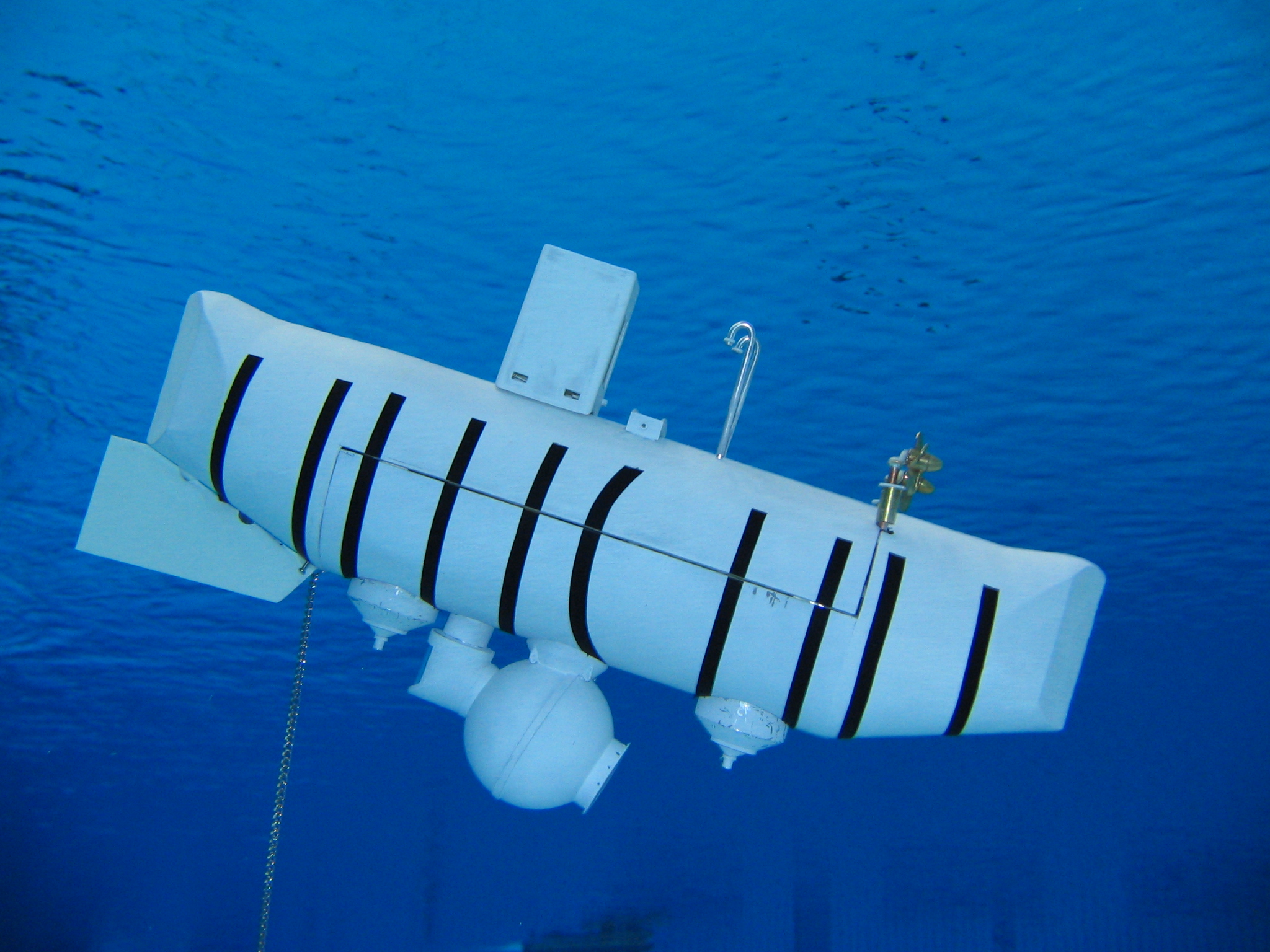
| B4f | 展示 | 自律/ 光ファイバー | 海洋研究開発機構 ドゥーグル・リンズィー/広和株式会社 | AUV/UROV「MROV改」:1.4m。W=80kg)プランクトンのその場観察が可能な海中顕微鏡を装備。 | 画像 |
| B5t | 水中デモ | 自律型 マルチエージェント | 東海大学 渡邊研究室 | 「S-TAMA」 急ピッチで改良中 | 画像 |
| B5t | パンフ配布 | 自律型 | (株)エス・イー・エイ | 自律型水中環境モニタリングロボット 「REMUS」のパンフを配布。 | 画像 |
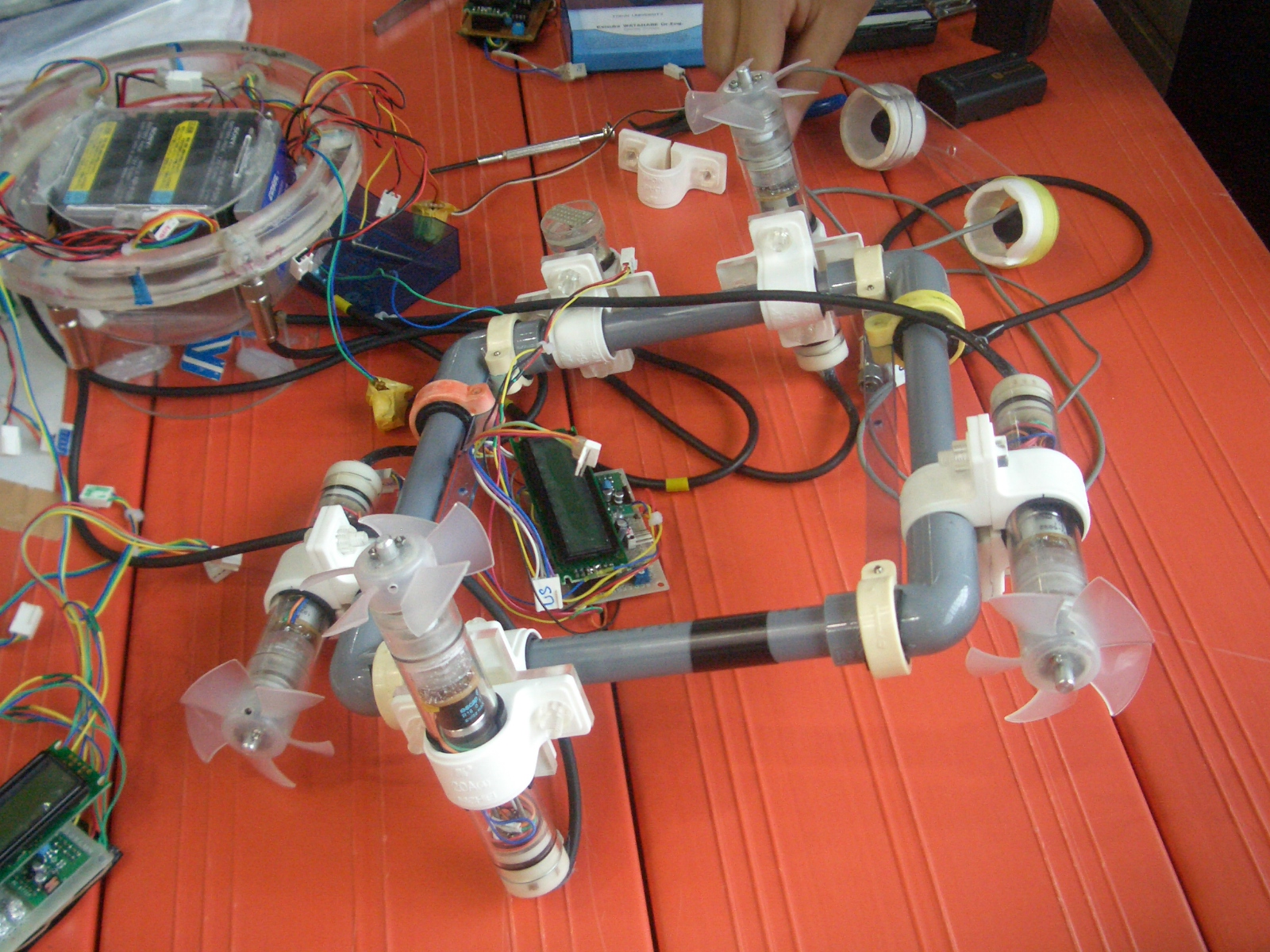
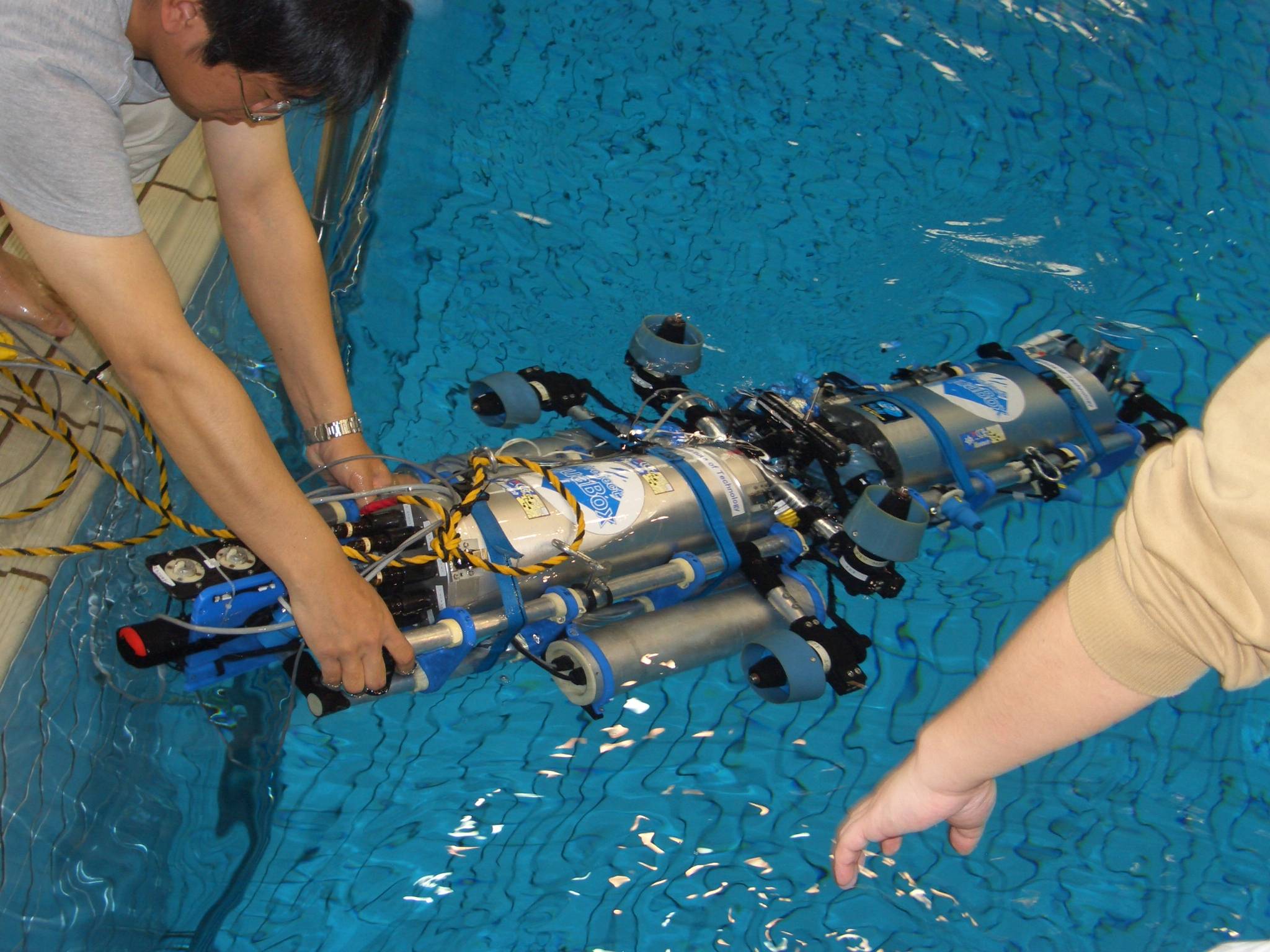
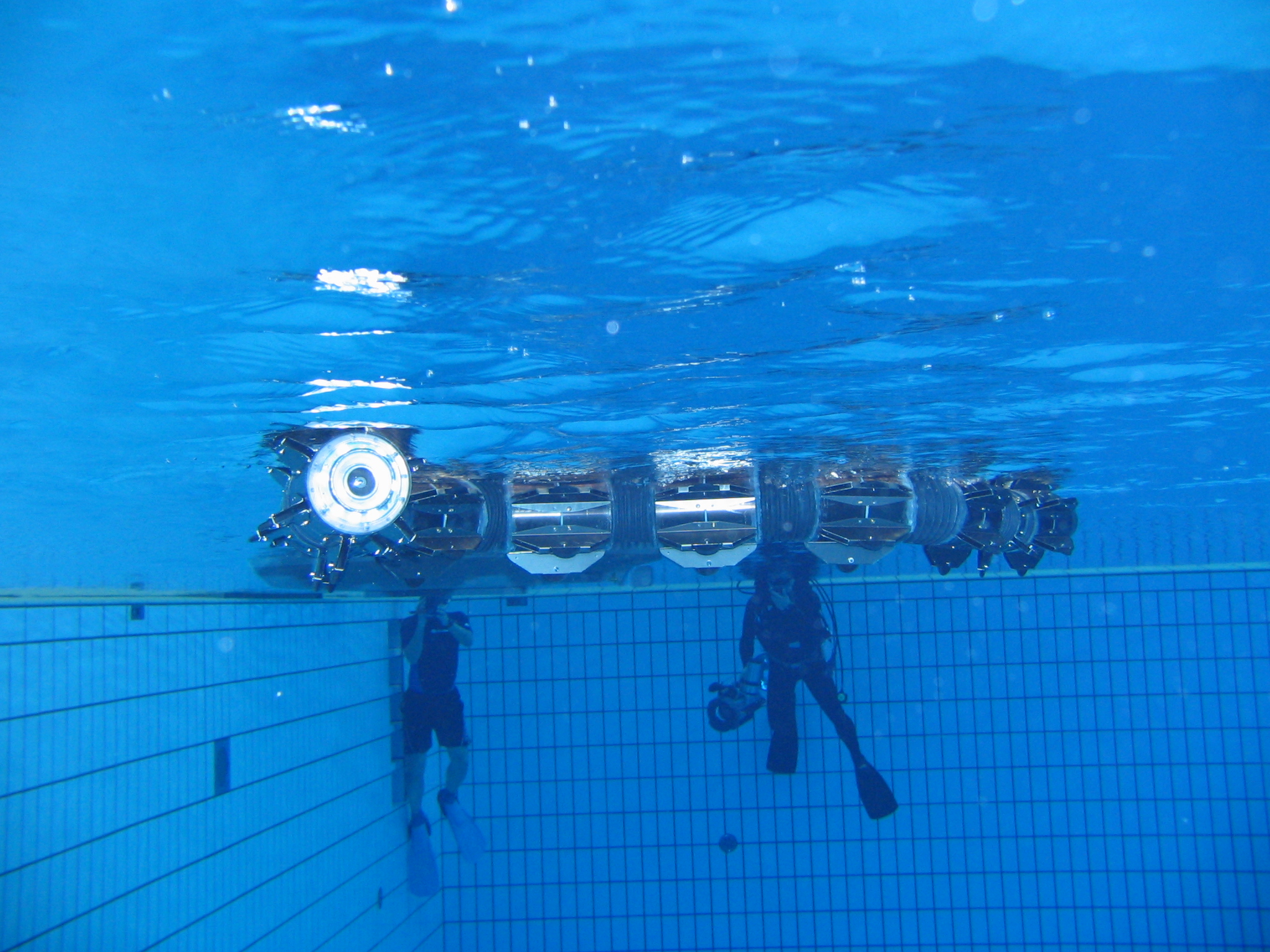
| B6p | 水中デモ | 自律型/ ケーブル | 九州工業大学 石井 研究室* | 「AquaBoxIII」:L:1.7m×B:0.6m、W=40kg。沿岸域での観測を目的として開発した水中ロボット。ロボット前部には、全方位カメラを搭載し周囲を観測。また下方にもカメラをひとつ搭載している。デモンストレーションは、軌道追従航行を行う予定。 小型AUV「SeaBird」:L:0.45m×B:0.70m、W=5.0kg。自律型の水中ロボット。船体下方向にカメラを設置しており、そのカメラを用いて ライントレースを行う。 | AquaBoxIII/SeaBird |
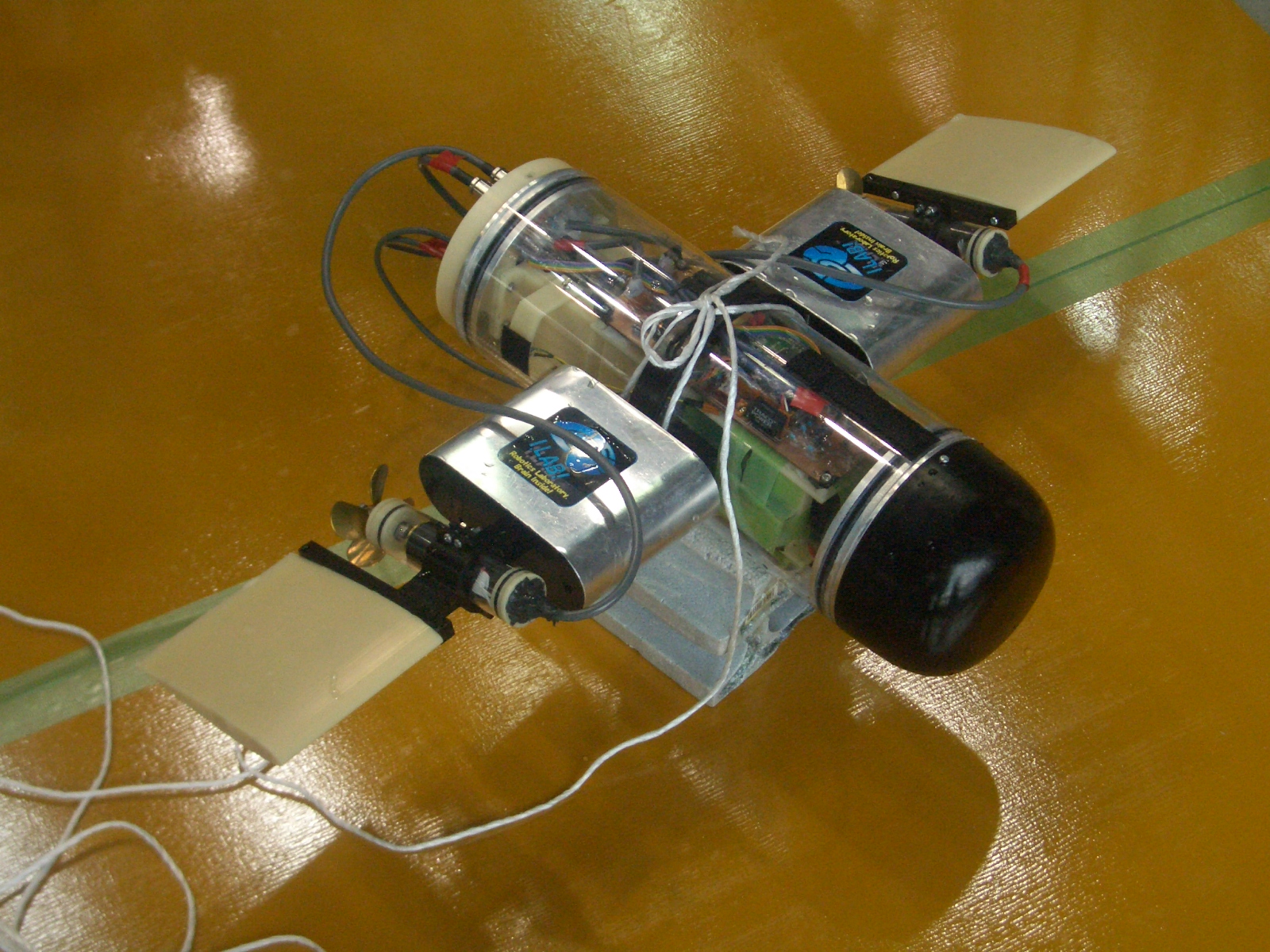
| B7p | 展示・陸上デモ | 自律型 | 東京大学 生産技術研究所 浦 研究室 ソーントン・ブレア* | Zero-G型AUV「IKURA」:L:50cm×B:22cm、W=17kg。 2005年に東京大学生産技術研究所で開発された世界初のZero-G型AUV。浮心と重心が一致するため、まるで無重力空間にいるように、あらゆる姿勢をとることが可能になる。 四つの内部ジャイロアクチュエータ(CMG)は、水中ロボットでは初めての試み。フライホイールとモータ付きジンバルで構成され、内部運動量交換により ロボットの姿勢を制御する。プロペラやフィンとは異なり、外部流体とは無関係に直接モーメントを発生させるため、機敏な運動が可能になる。 CMGをZero-G型に適応することで得られる自由姿勢制御性により、ロボットの行動が3次元的に最適化され、海中生物の追跡や複雑な環境の探査など、今まで不可能だった任務をこなすことができると今後期待される。 | 画像/avi動画 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
●水中グライダー
| ※ | 参加形態 | 操縦方式 | 所属(担当者) | 参加作品 | 画像 |
| B8p | 工作事例紹介・水中デモ | 釣糸 | 水中ロボコン情報 メーリングリスト | ペットボトル製水中グライダー「DeepDiver5」(中高生向け工作課題) | 動画 |
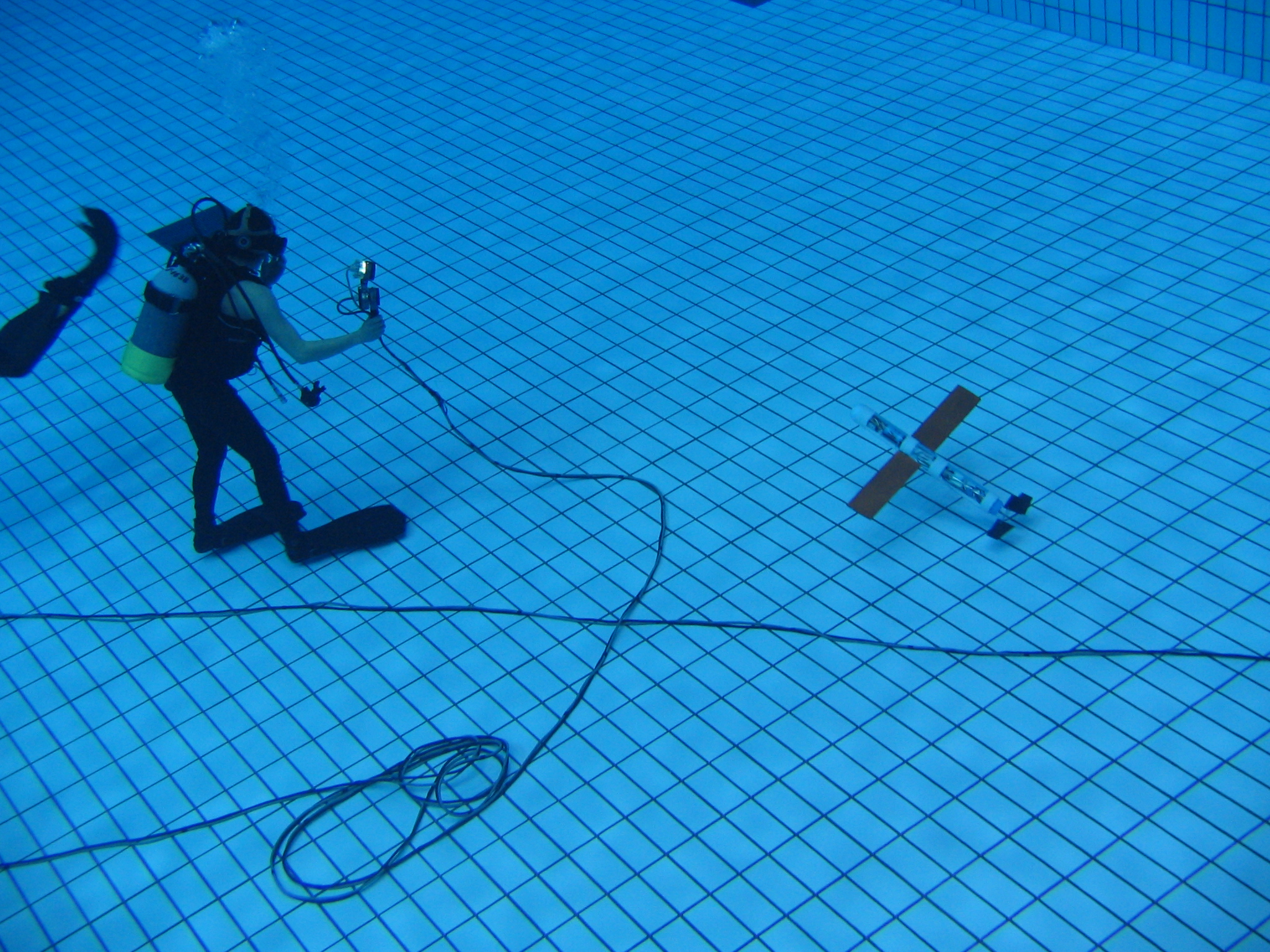
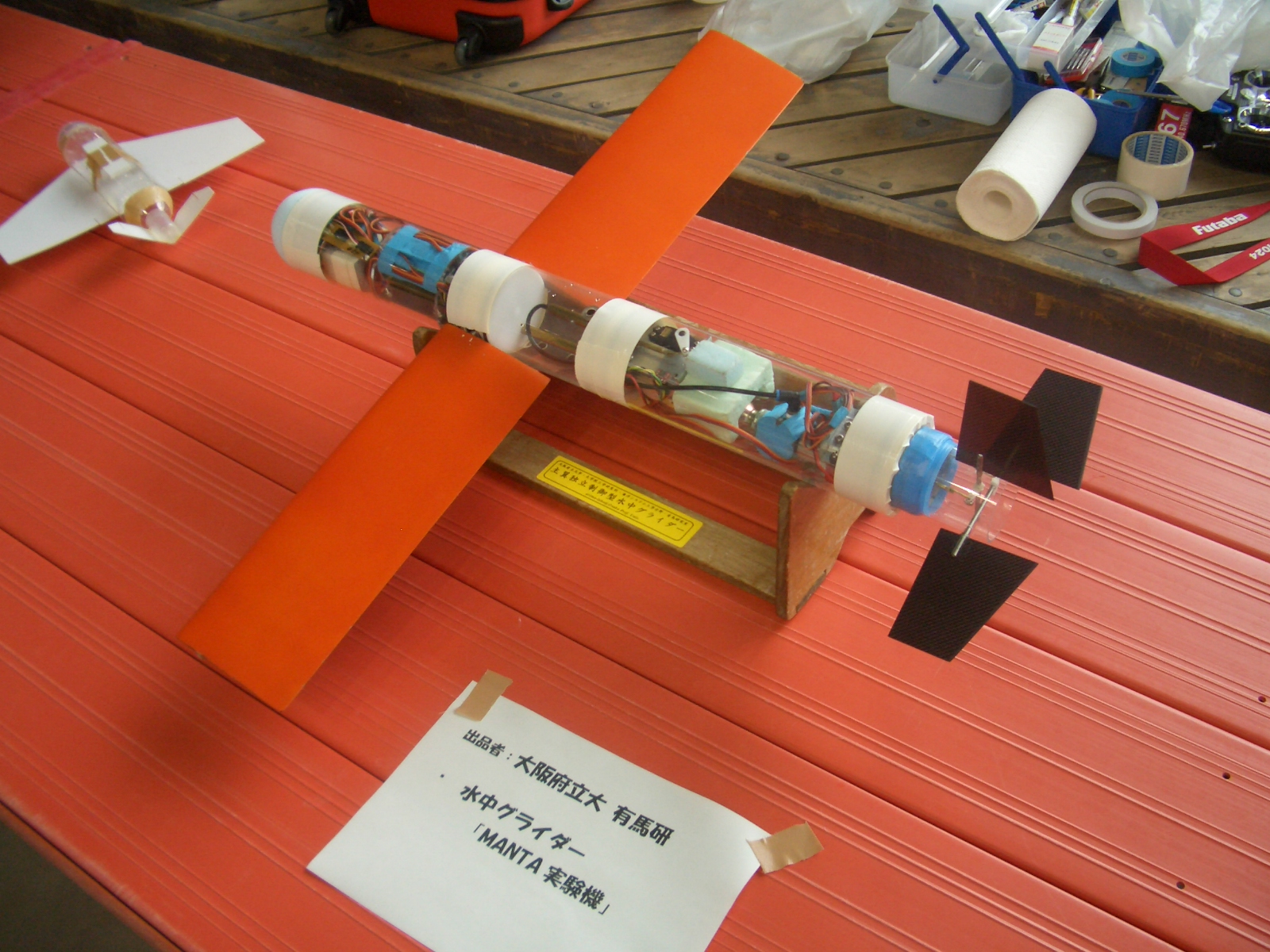
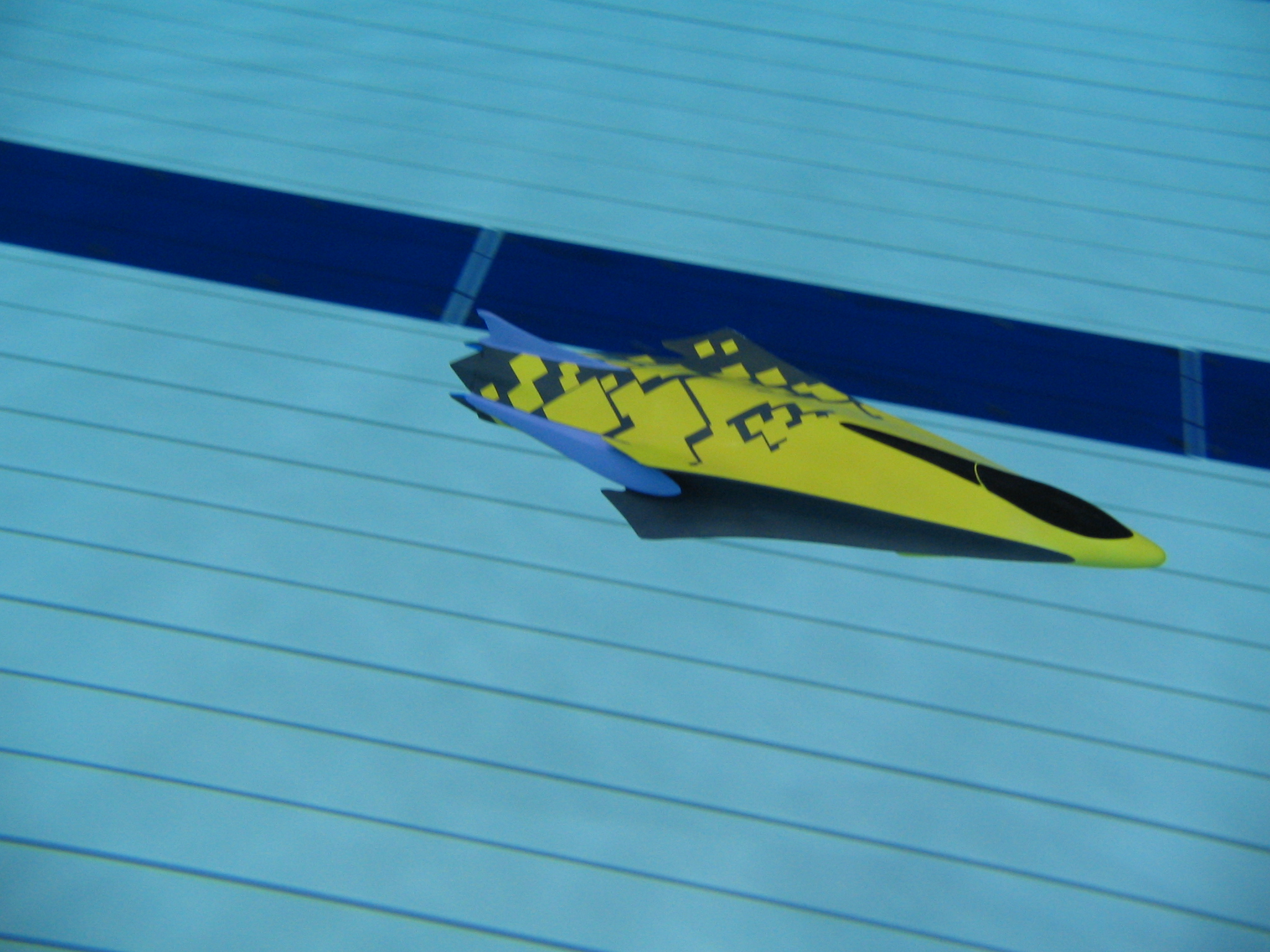
| B8p | 水中デモと展示 | 自律(AUV)/ 無線(RC)#67 | 大阪府立大学 有馬研究室 | 「MANTA実験機」:主翼独立制御型水中グライダーの実験機。自動制御に向けて調整中。今回の水中デモはラジコンで実施。 | 画像水中/画像展示 |
{kind=link}
{kind=link}
●アクアバイオロボット
| ※ | 参加形態 | 操縦方式 | 所属(担当者) | 参加作品 | 画像 |
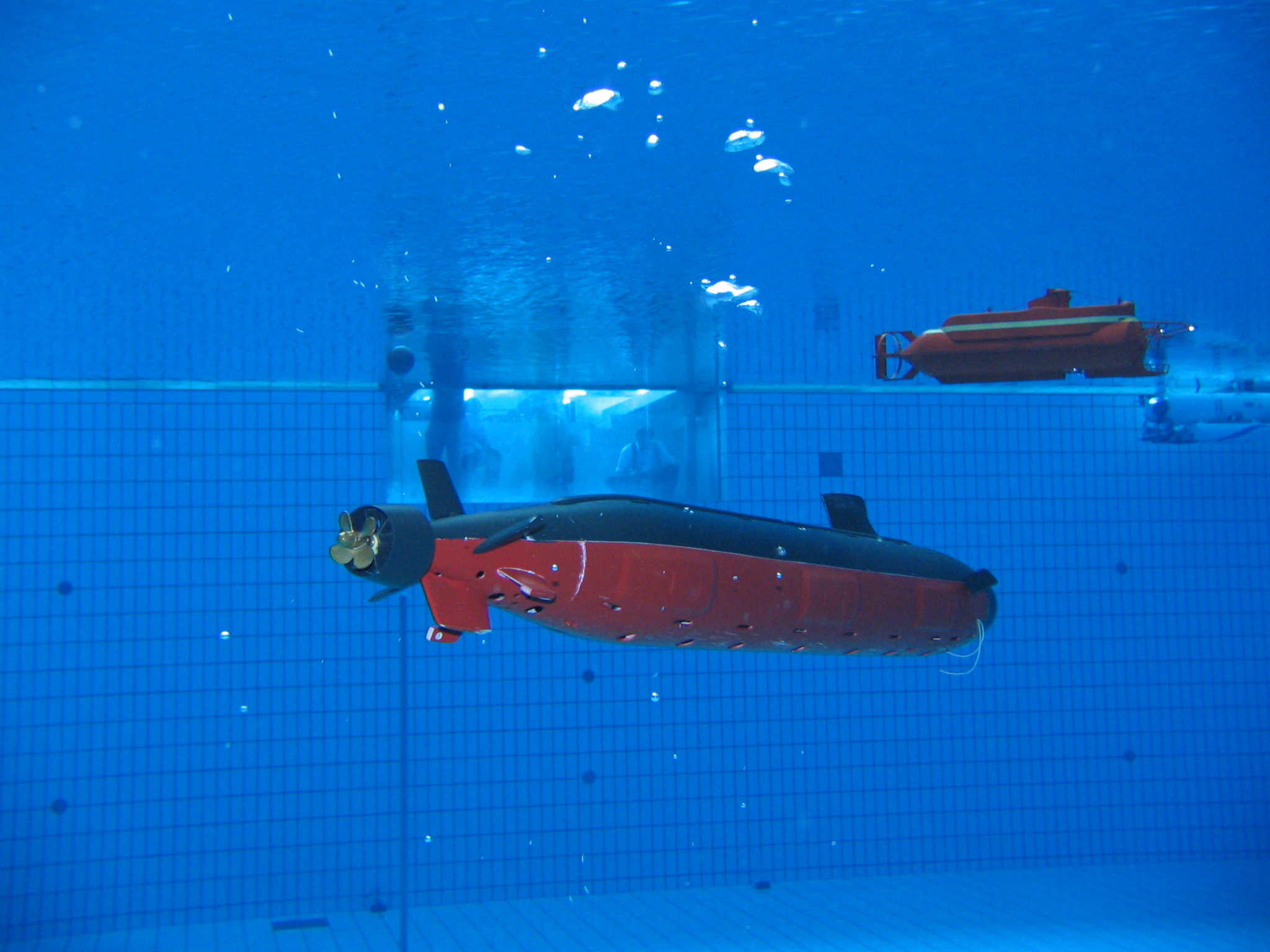
| A4f | 水中デモ | 光ファイバー | MHIソリューション テクノロジーズ(株) 機械・プラント技術部* | 魚型作業ロボット:L:約1.5m×B:約0.9m、W=約70kg。魚型をしたテザーケーブル付きROVを開発しました。テザーケーブルには光ファイバを使っています。ロボットには小型TVカメラを搭載しており、撮影した水中の映像を光ファイバを通して地上のモニタに写しだして見ることができます。 ・胸ひれ、尾ひれには弾性振動翼を適用しています。これを動かして水中を魚のように遊泳します。また体内には位置をかえられる錘を組込んでおり、遊泳動作をスムーズにするのに役立てています。 ・海中での使用も考慮しており、水深50mまで潜水することができます。 ・魚型作業ロボットは「H18年度ひろしま産業創生補助金」の適用を受け、共同研究グループ(田中電機工業(株):田中秀和社長、広島ガスサービス(株):久保 一志社長、MHIソリューションテクノロジーズ(株):山本惠一社長)で開発したものです。 「新鯉型ロボット」(展示) | 魚型作業ロボット:画像1/画像2/avi動画1/avi動画2/avi動画3/wmv動画/鯉ロボット画像 |
| C1p | 水中デモ・体験操縦 | 無線(RC) #08 | 東京理科大学 稲垣研究室* | ウナギ型水中推進ロボット:L:87cm×B:4cm,W=2.8kg。ウナギのように尾に向かって振幅が増大する屈曲運動を発生し推進するロボット。 | 画像1/画像2/avi動画/mov動画/wmv動画(17MB) |
| C2p | 水中デモ | 自律型 | 東京海洋大学 伊藤研究室 | ウミヘビロボット、バタ足ロボット | 画像 |
| C2p | 水中デモ | 自律型 | 東京海洋大学 大学院海洋技術研究科 博士後期課程2年 塩崎 洋(伊藤研究室) | ウミヘビロボット(水中蛇型ロボット):L:78cm×B:5cm, W=2.5kg。マイコンによるプログラム方式(事前に入力したプログラムに沿って泳ぐ) | 画像 |
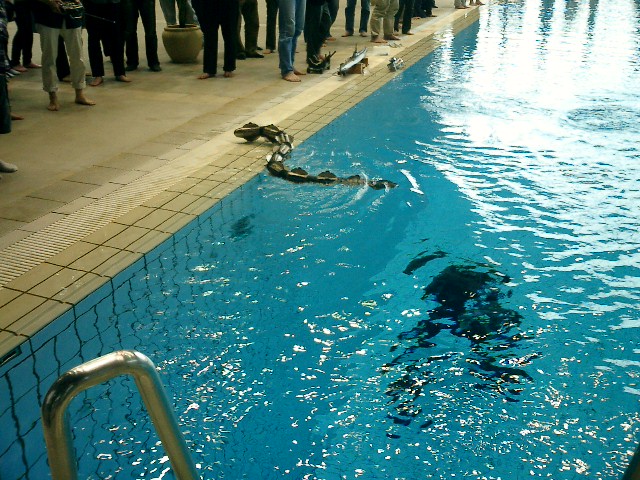
| C3p | 水中デモ | 無線(RC) #69 | 東京工業大学 広瀬研究室* | ヘビ型ロボット「ACM-R5」:L:1.6m×B:15cm, W=7.5kg。 生物のヘビを模して作られた水陸両用ヘビ型レスキューロボットです.水中では0.8m/s程度で自在に泳ぐことができます。 | 入水時画像/水中画像/avi動画/mov動画/上陸時画像 |
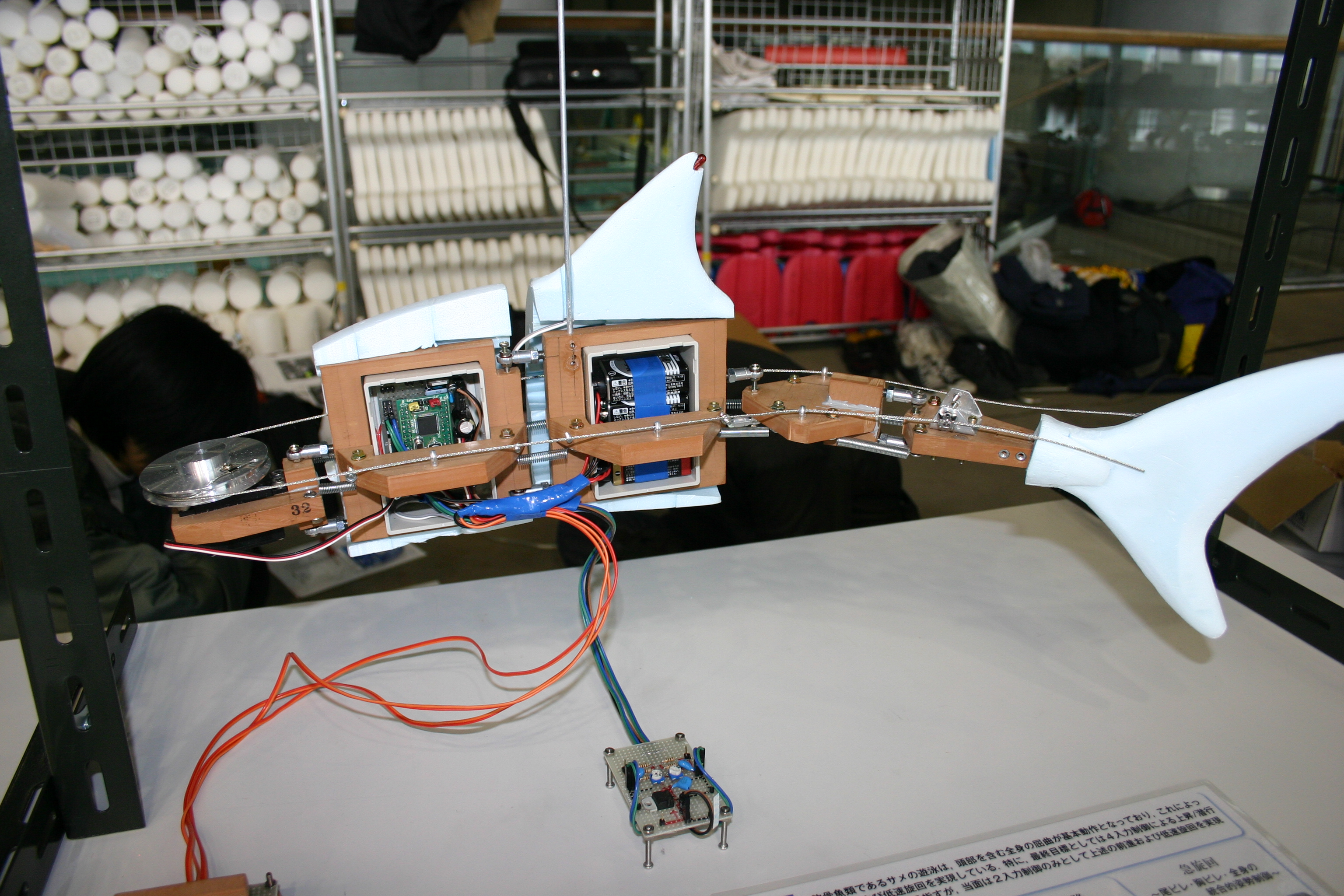
| C4t | モックアップによる動作デモ | 無線 | 東京農工大学 機械システム工学科3年生 古澤大地(佐久間研究室) | 「入力制御によるサメ遊泳機構」:L:65cm×B:15cm×H:10cm、W:0.8kg。#11,12。軟骨魚類であるサメの遊泳は,頭部を含む全身の屈曲が基本動作となっており,これによって前進および低速旋回を実現している.特に,最終目標としては4入力制御による浮上/潜行と急旋回の実現を目指すが,当面は2入力制御のみとして上述の前進および低速旋回を実現するための機構を検討する. | 画像1/画像2/avi動画 |
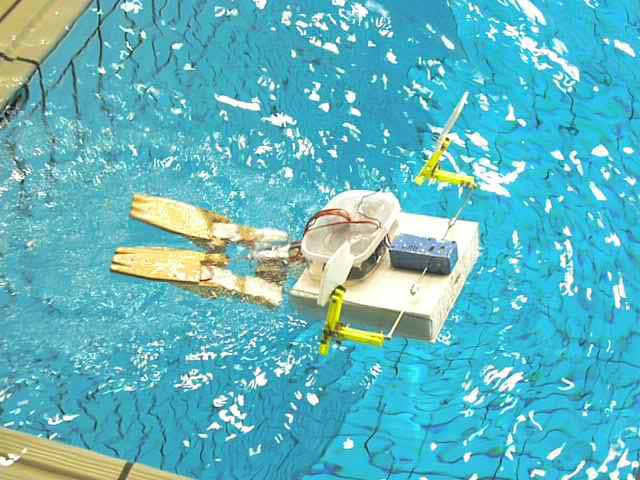
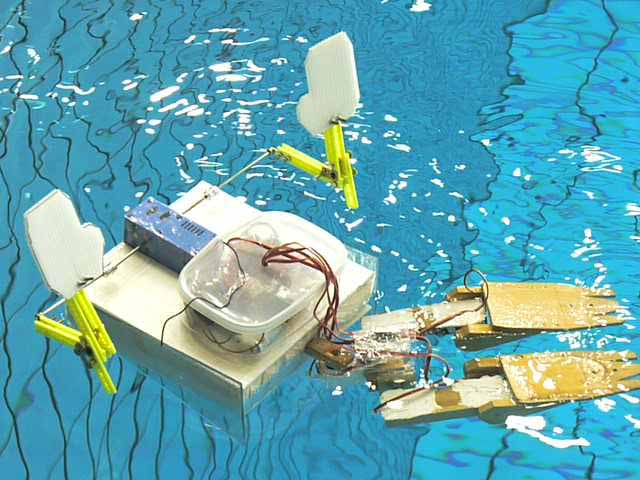
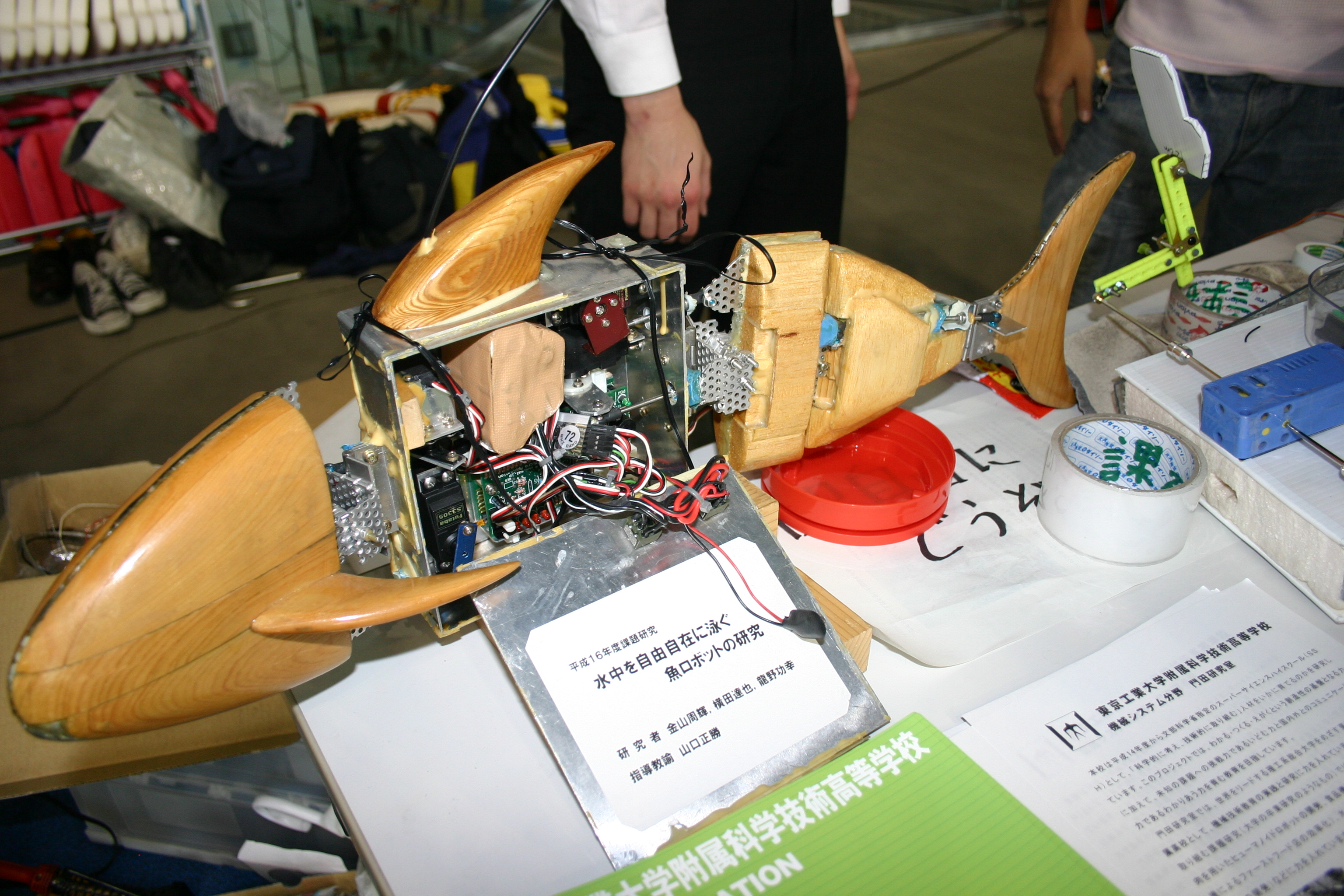
| C5t | 水中デモ | 無線 (315MHz, 418MHz) | 東京工業大学 附属科学技術高等学校 2年生システムデザインロボット分野 松野 孝博* (指導教員:門田先生) | 「泳ぐヒューマノイドロボット」学生部門最優秀賞 L:50cm×B:30cm、W=700g。パソコンによる操縦。電源はロボット側に搭載:直流、電流4000ミリアンペア、電圧6ボルト ①二足歩行ロボット(人型ロボット)の可能性及び行動範囲の拡大を目指す。 ②単独で入水と上陸を行える水陸両用ロボットを製作する。 ③ロボットの製作を通して人の泳ぎのメカニズムを考察する。 ④将来的には人が持つ“手”を有効利用し、海洋研究や海難救助への応用の基礎を作る。 以上のことを目標として泳ぐロボットを研究しています。 | ヒューマノイド:画像1/画像2/mov動画1/mov動画2/魚ロボット画像/優勝チーム |
| C6t | 展示 | 無線(RC) | 海上技術安全研究所 平田研究室 | 「実験用魚ロボット」:研修生らが製作した魚ロボットを展示します。 | 画像 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
●ラジコン潜水艦
| ※ | 参加形態 | 所属(担当者) | 参加作品 | 画像 | |
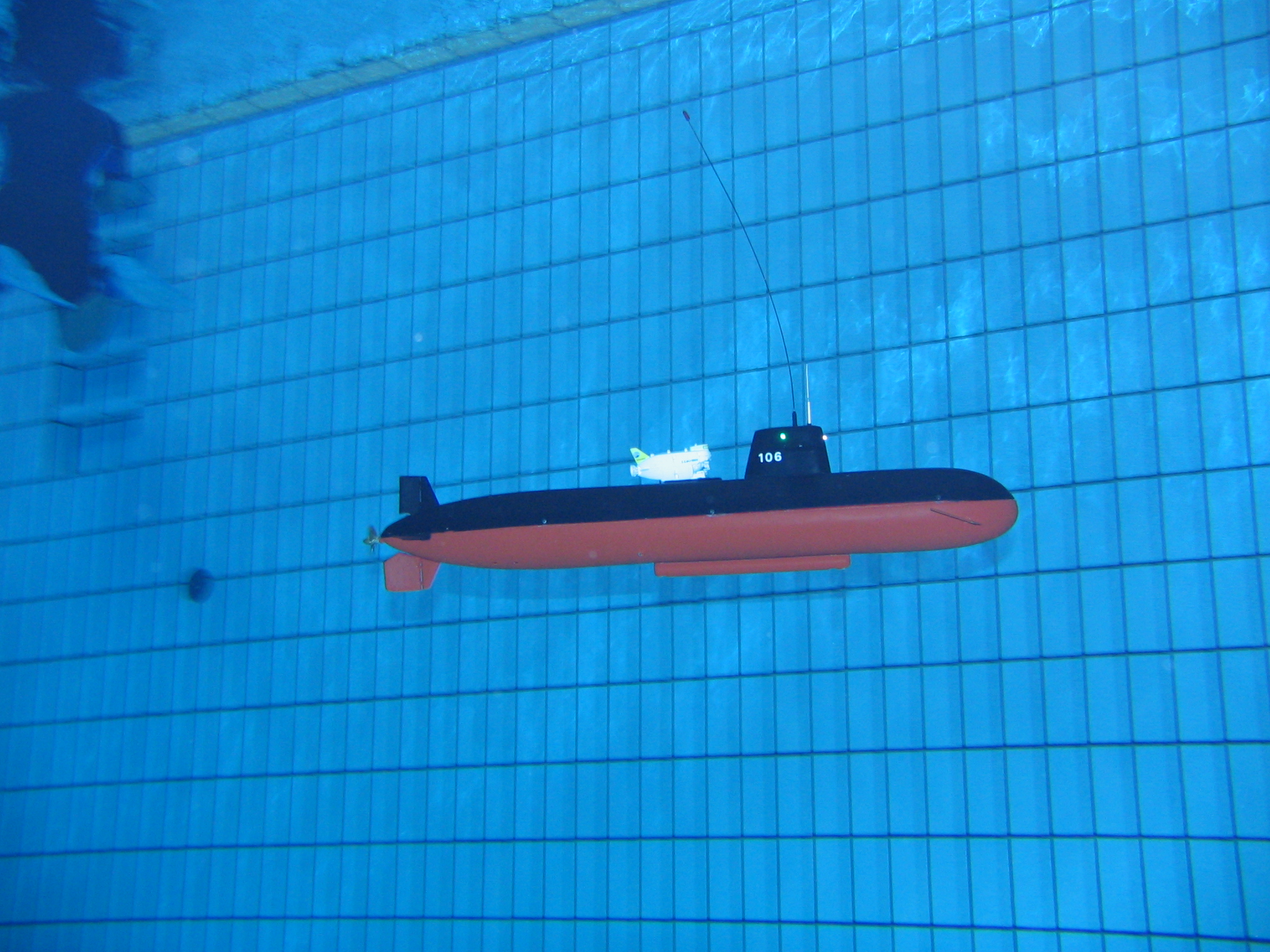
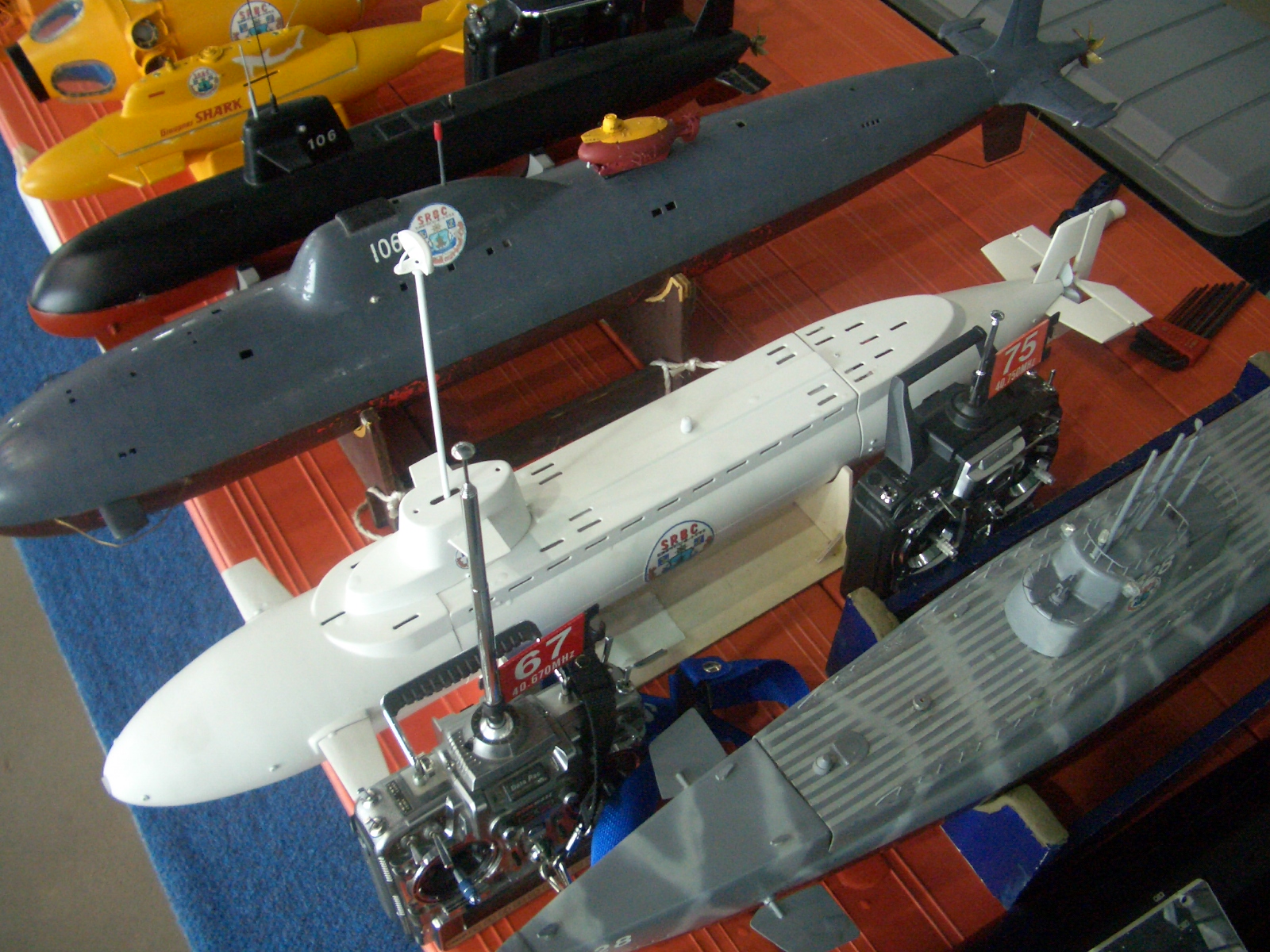
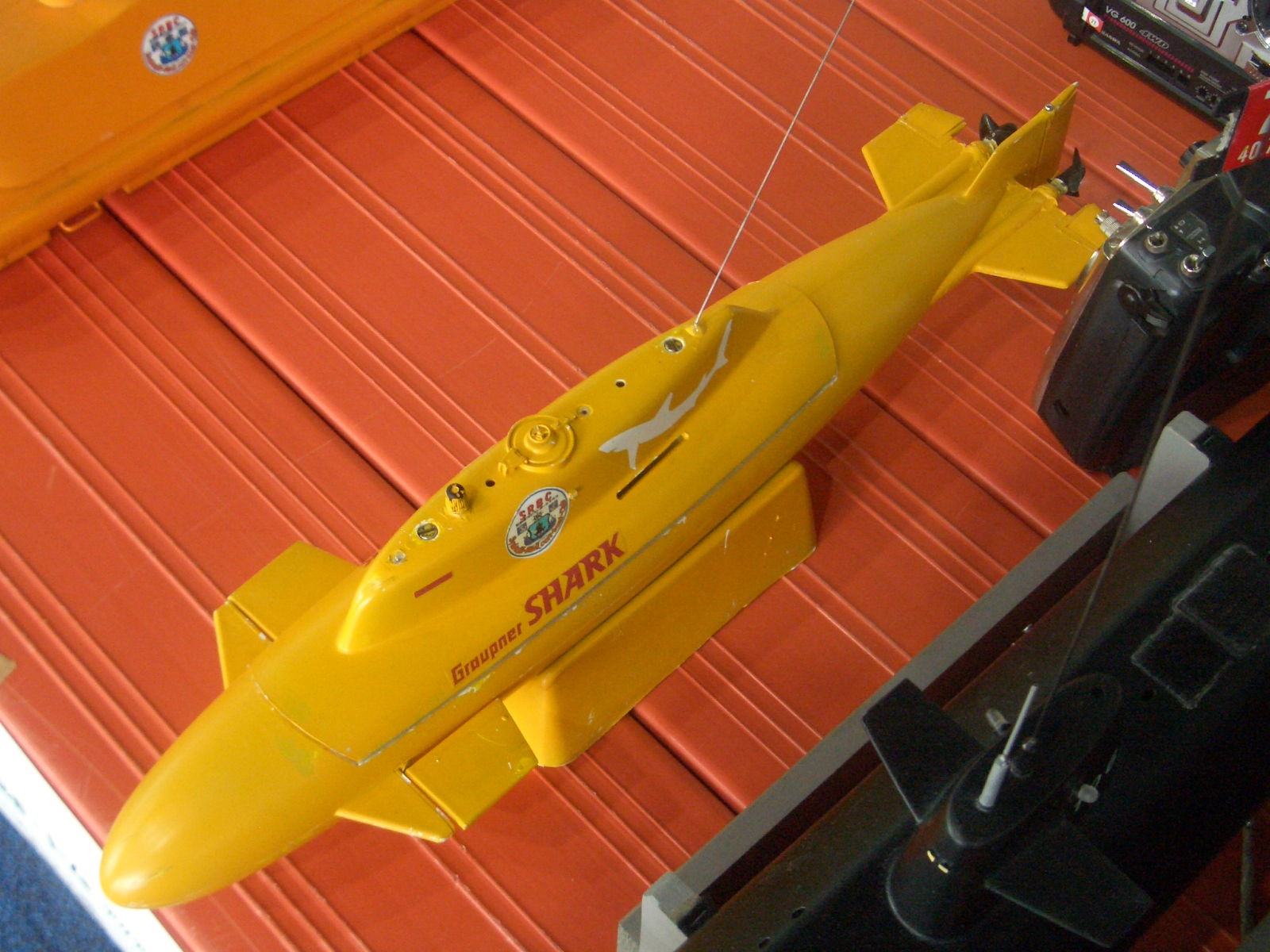
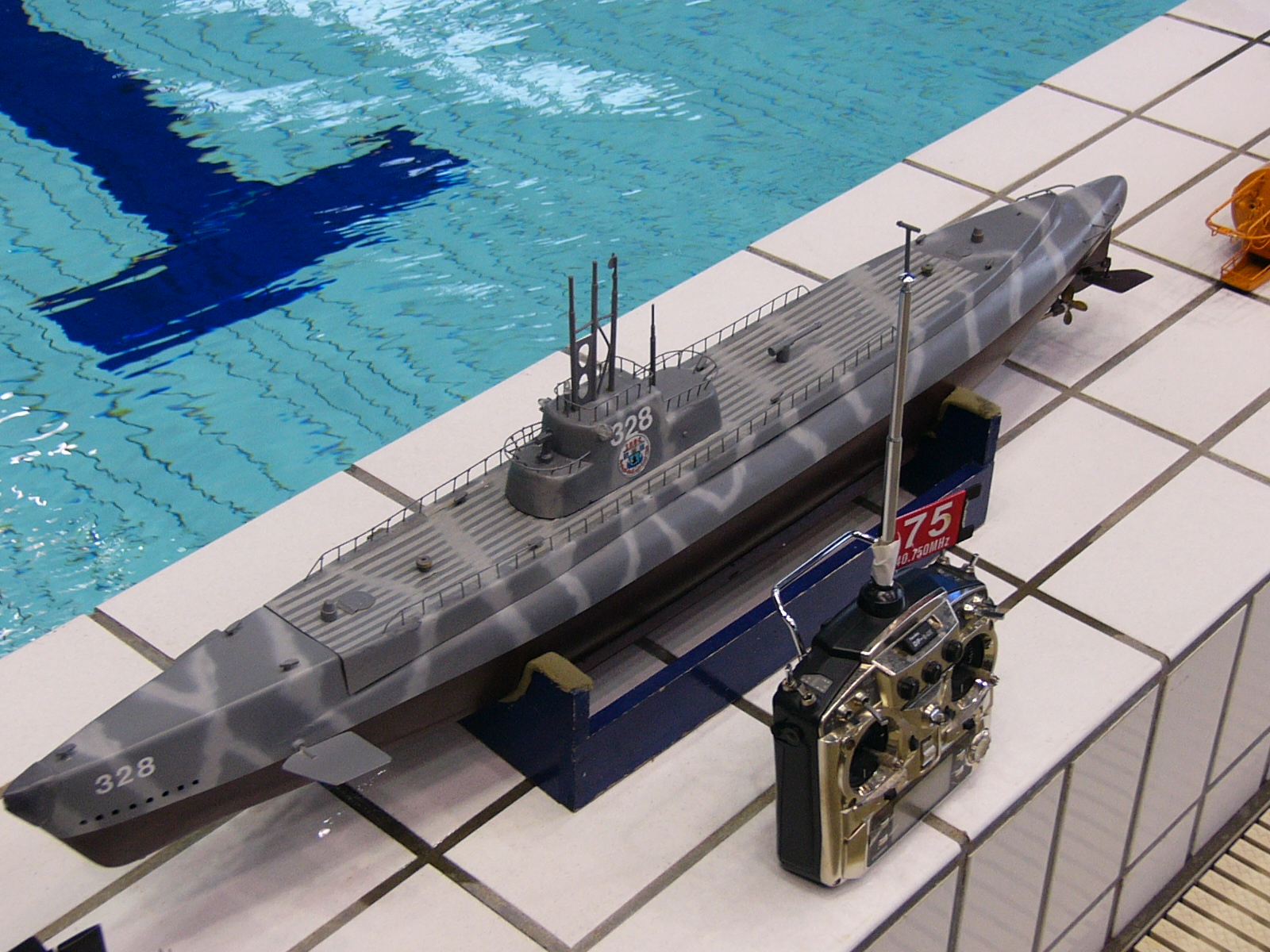
| D2p | 水中デモ・体験操縦 | 無線(RC) | チームシナノ* | アクアレーサーⅠ(L:54cm、#61,63,67)、シーウルフ改造(トランペッター社プラモデル改造品、L:60cm、#65,69,73,75)、U2540XXⅠ(独ロベ社キット。L:1.915m、W=12kg)、ニッコーシーウルフ(黄色) | U2540XXⅠ/アクアレーサー |
| D2p | 水中デモ | 無線(RC) #75 | ベルーガ* (チームシナノ) | 「アクアレーサー1」:L:55cm×B:9cm、W=? | |
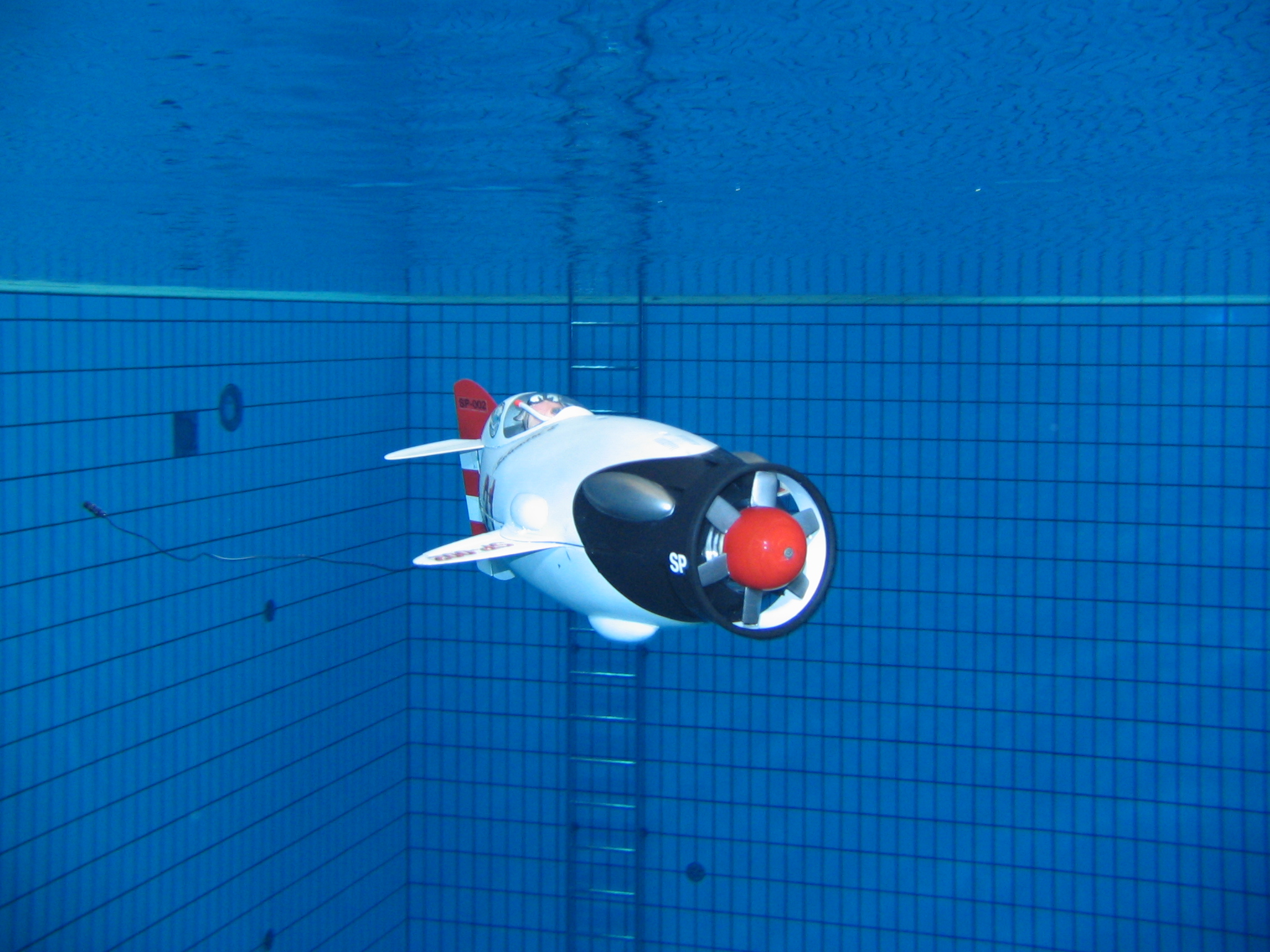
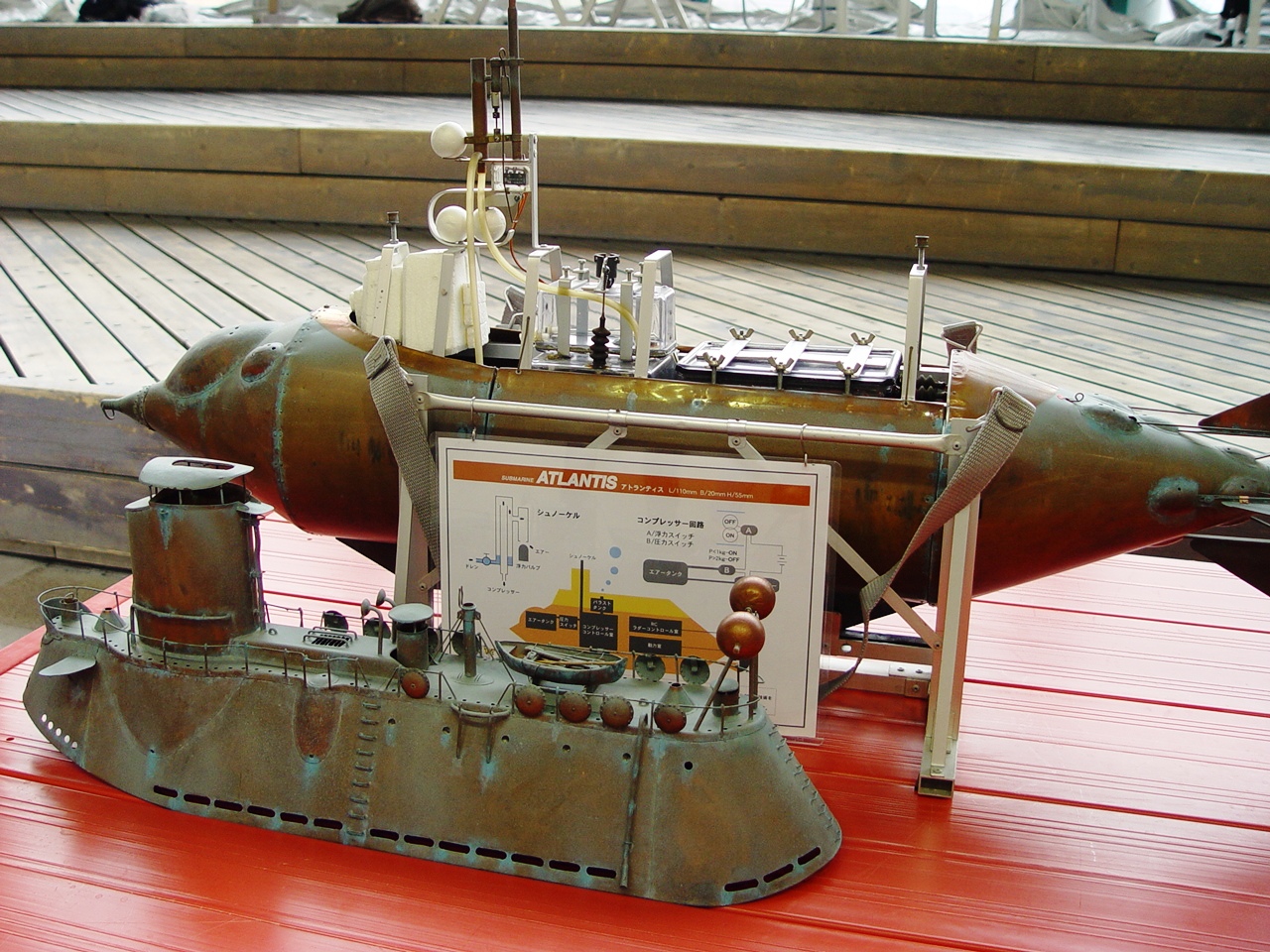
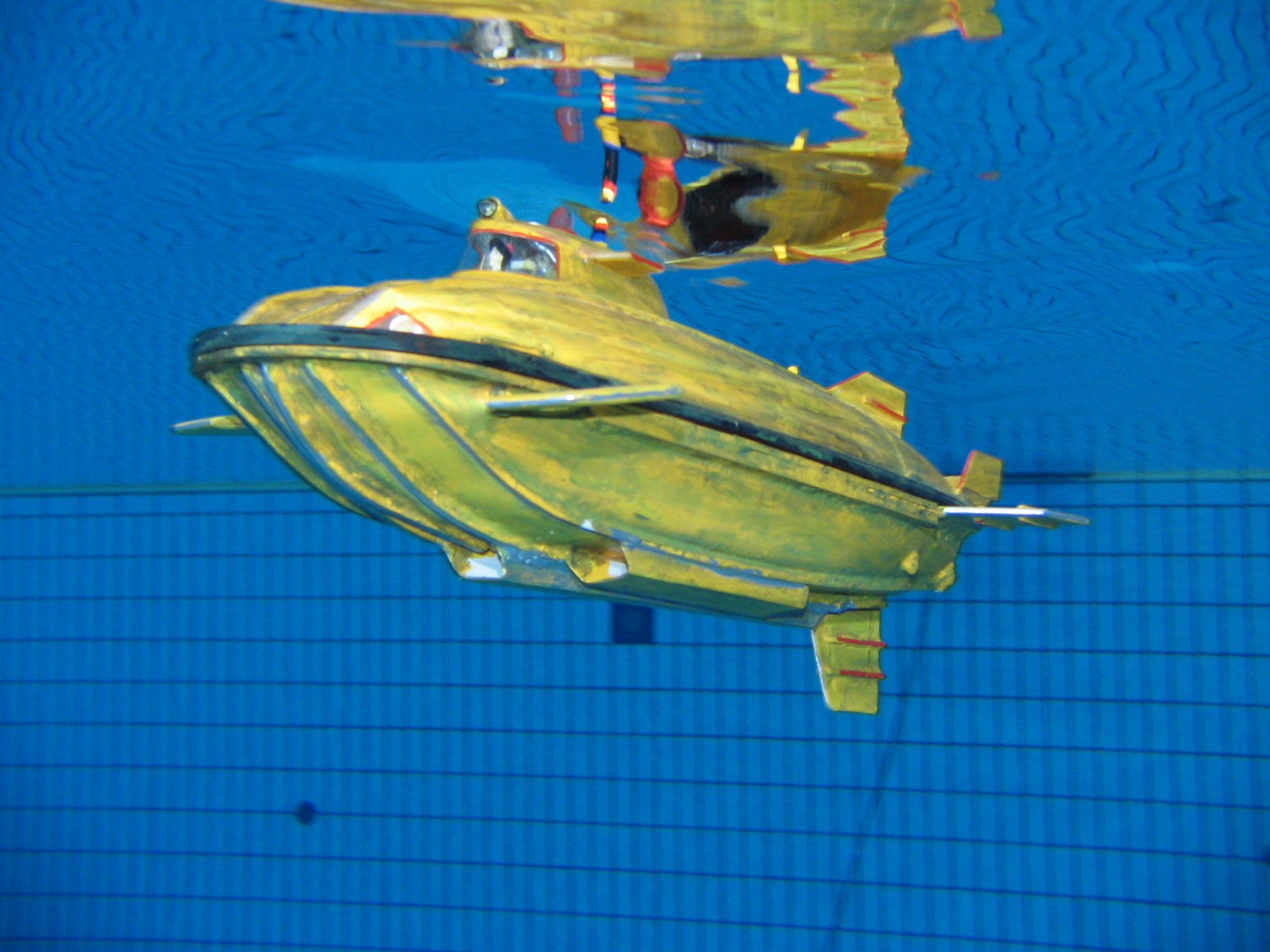
| D3p | 水中デモ・展示 | 無線(RC) #04 | 手作りロマン製作所 | 「さぶまる 2」:L:42cm×B:27cm W=950g。船体はエンビを熱成形し組み立てたもので、ギアダウンしたモーターで機首のプロペラを回し水中飛行します。形は1930年代のエアーレース機[GB]のイメージで、コクピットにはシュノーケルをくわえた犬のパイロットが乗っています。 「アトランティス」:L:1.1m×B:20cm×H:60cm、W=5kg(展示) | さぶまる:画像/avi動画/アトランティス:画像1/画像2/画像3 |
| D4p | 水中デモ | 無線(RC) | RC艦隊 | 「サブマリン707二世号」、「アクアレーサー」、潜水調査船「よみうり号」 | 707:画像1/画像2/ノボ画像/よみうり号画像 |
| D4p | 水中デモ | 無線(RC) | バンダイビジュアル/平尾モデル | TVアニメ「タイドラインブルー」主役潜水艦「ユリシーズ」 | 画像1/画像2 |
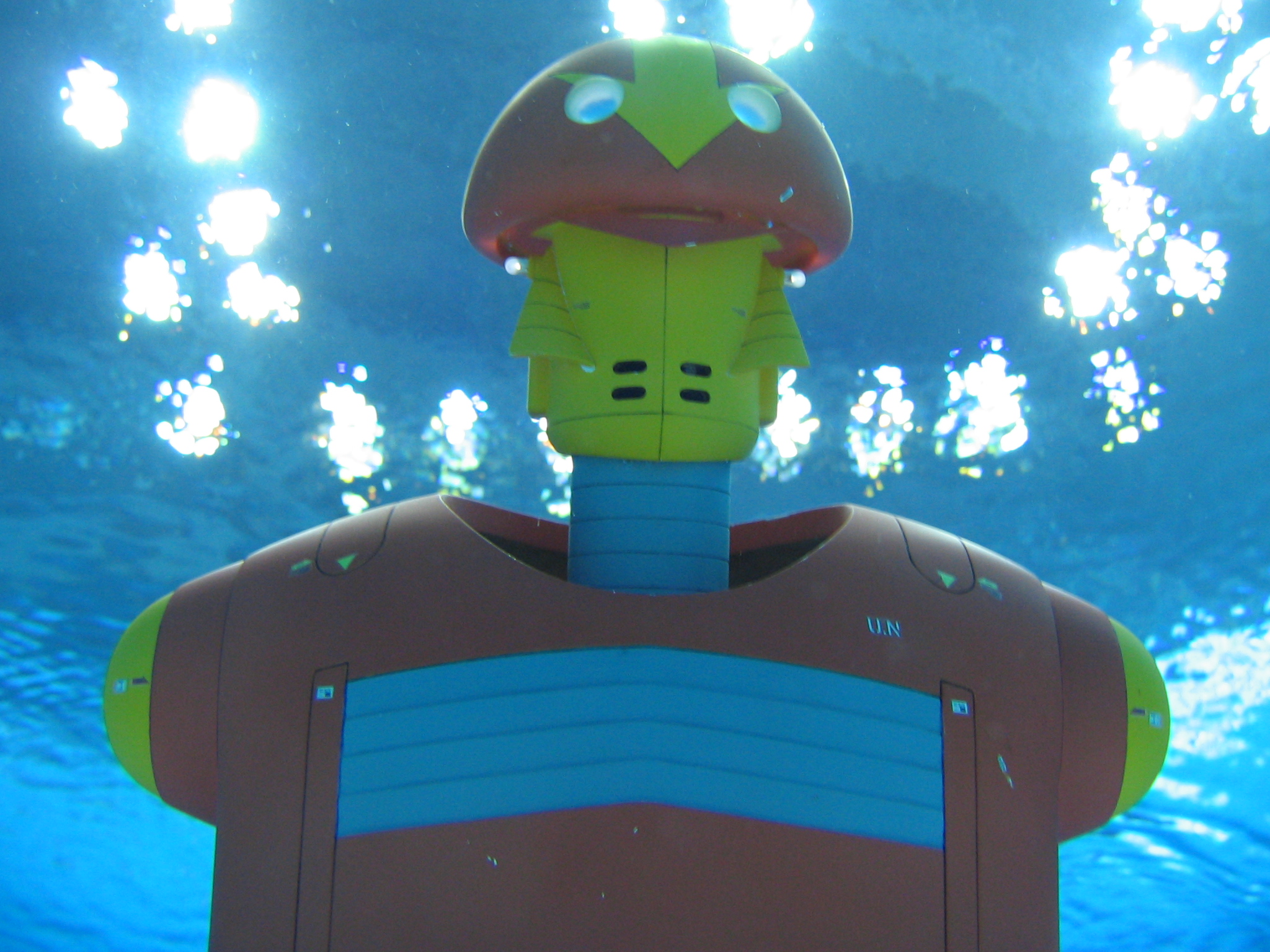
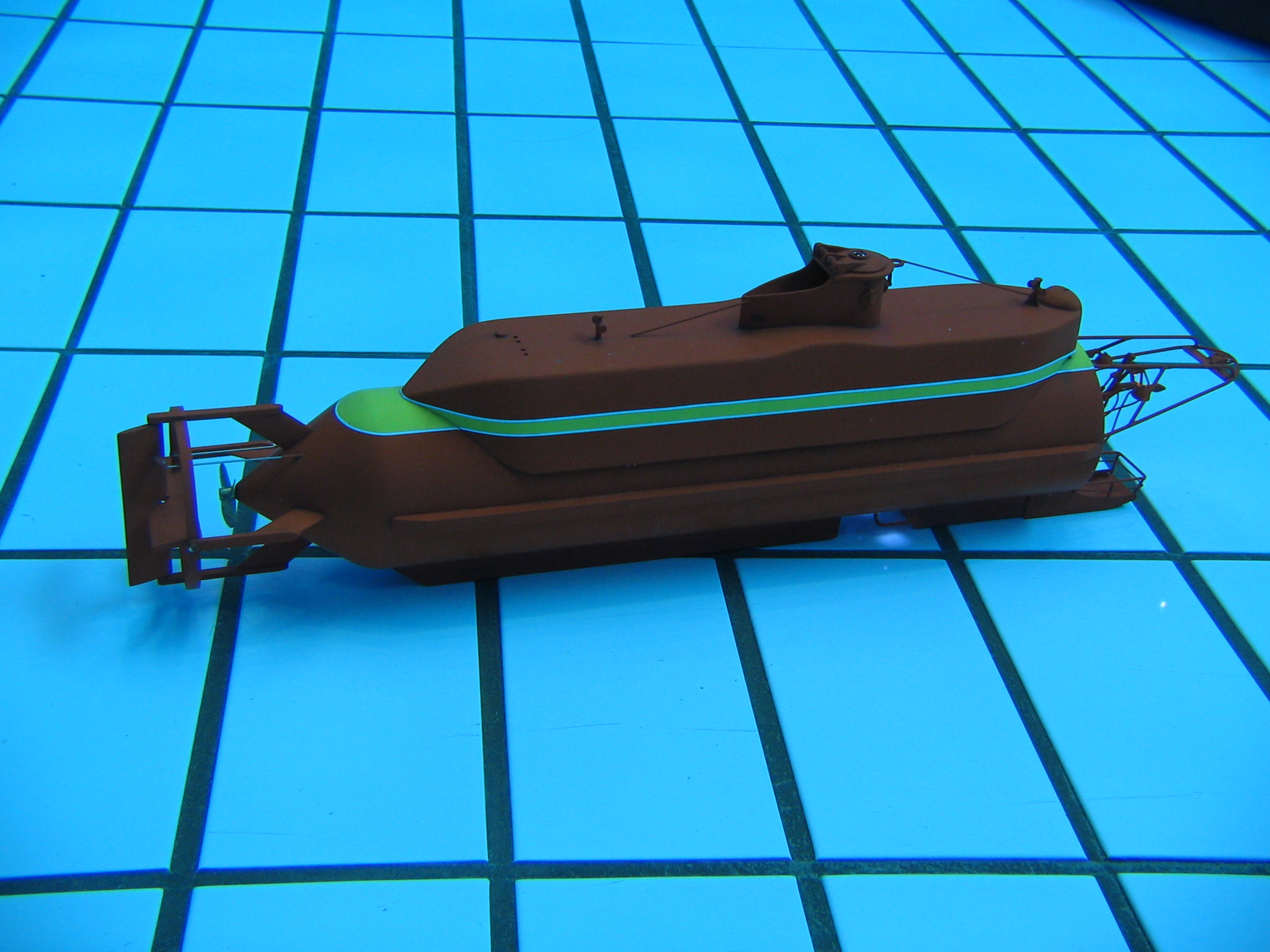
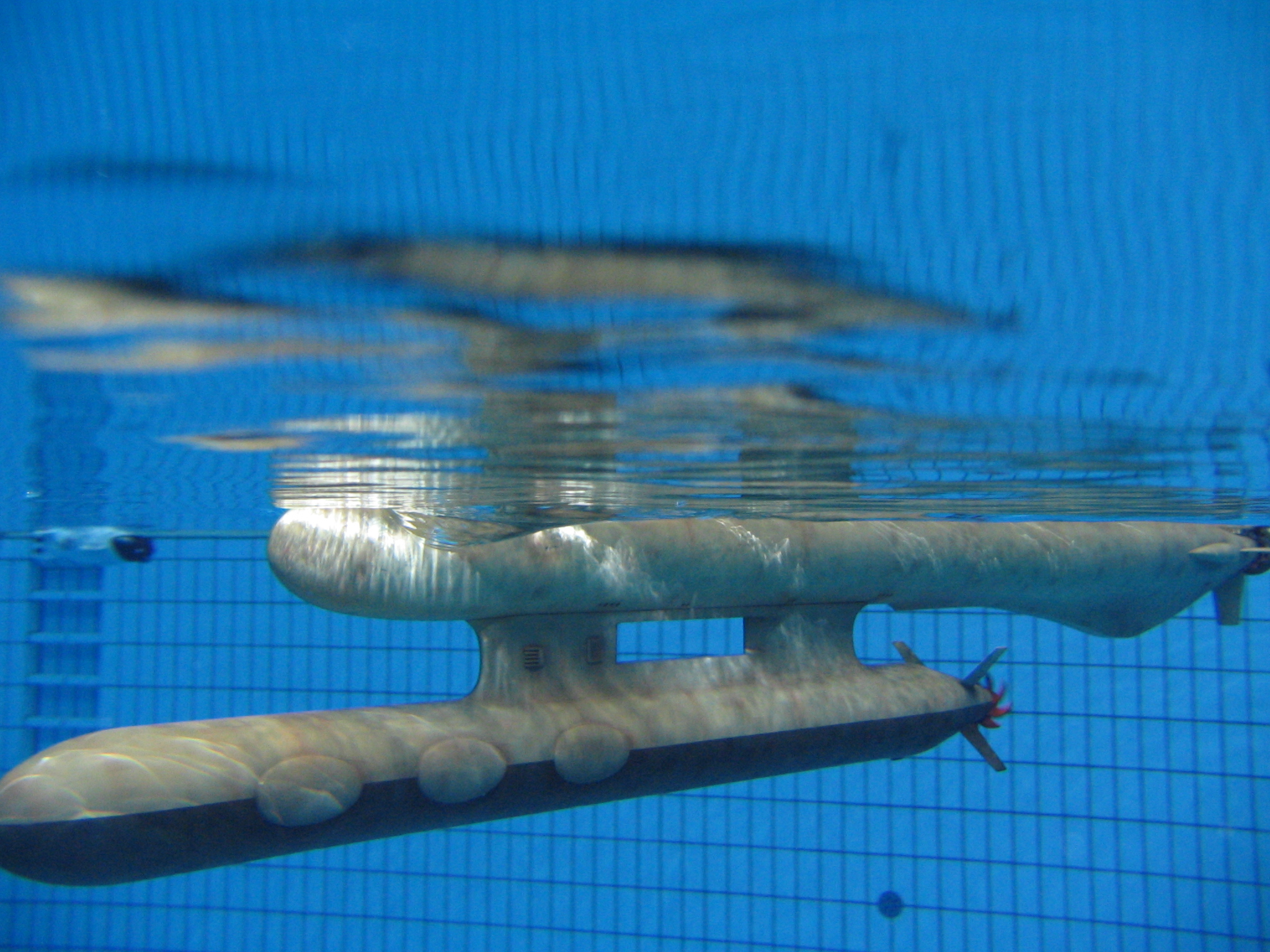
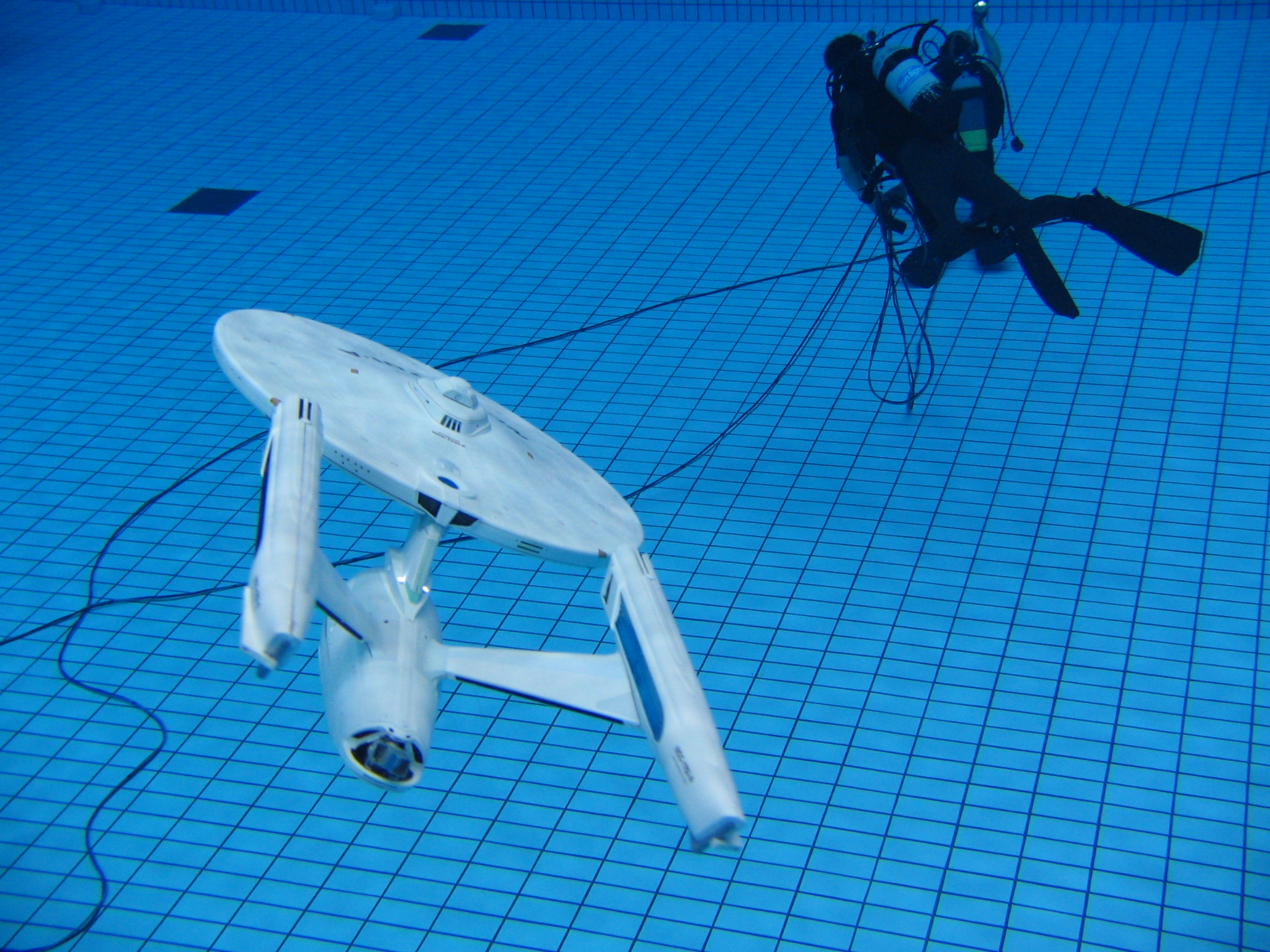
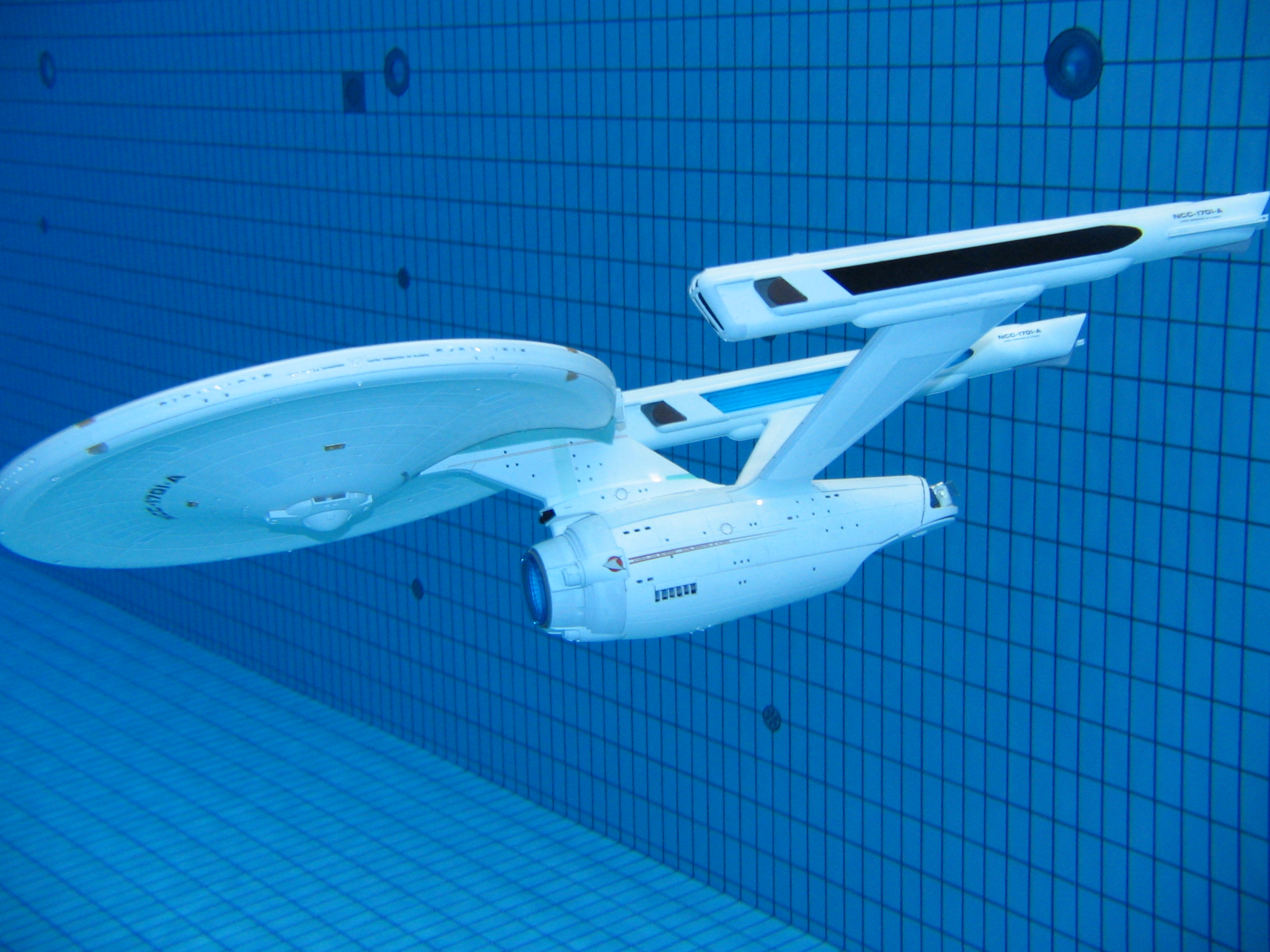
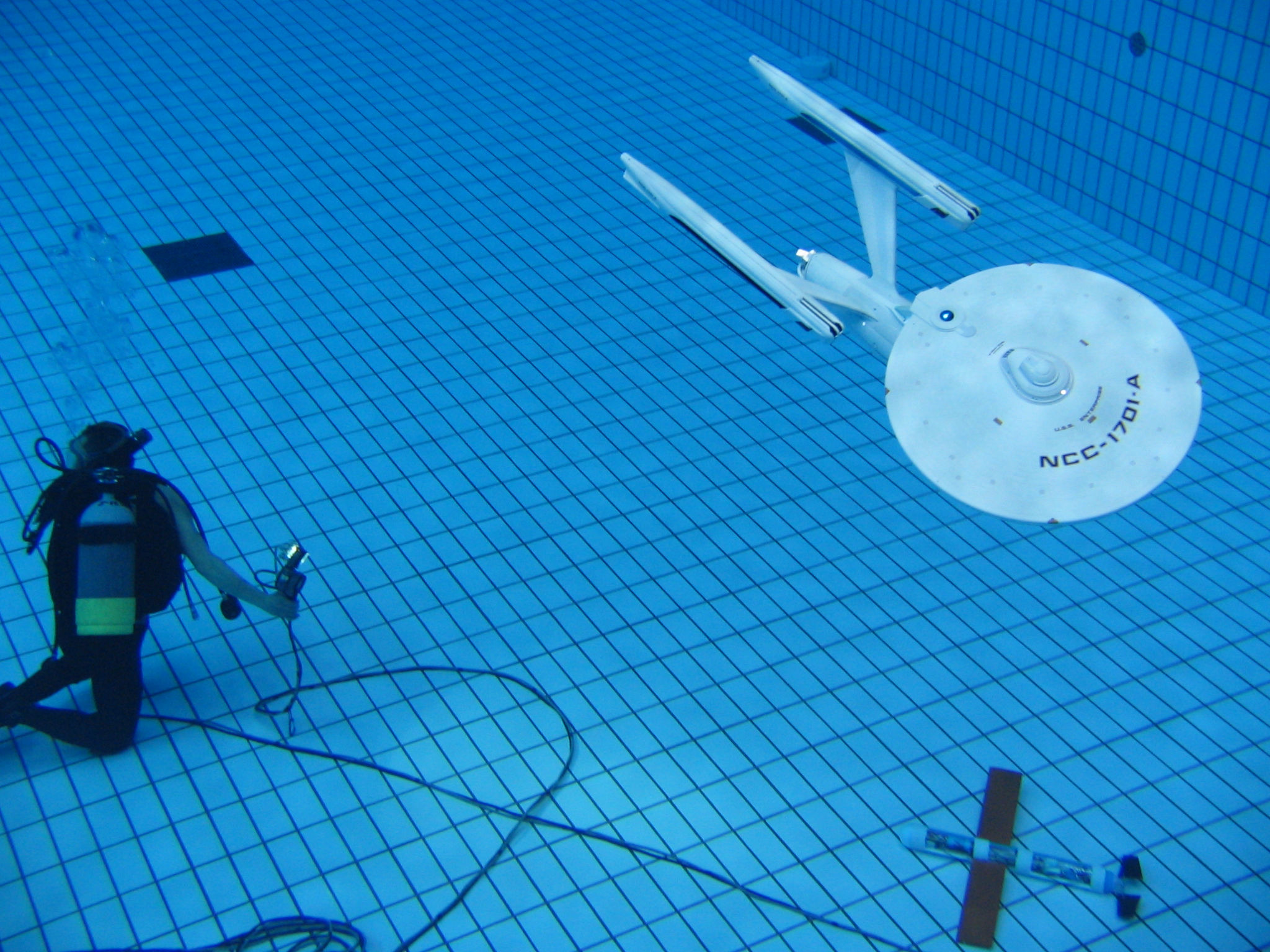
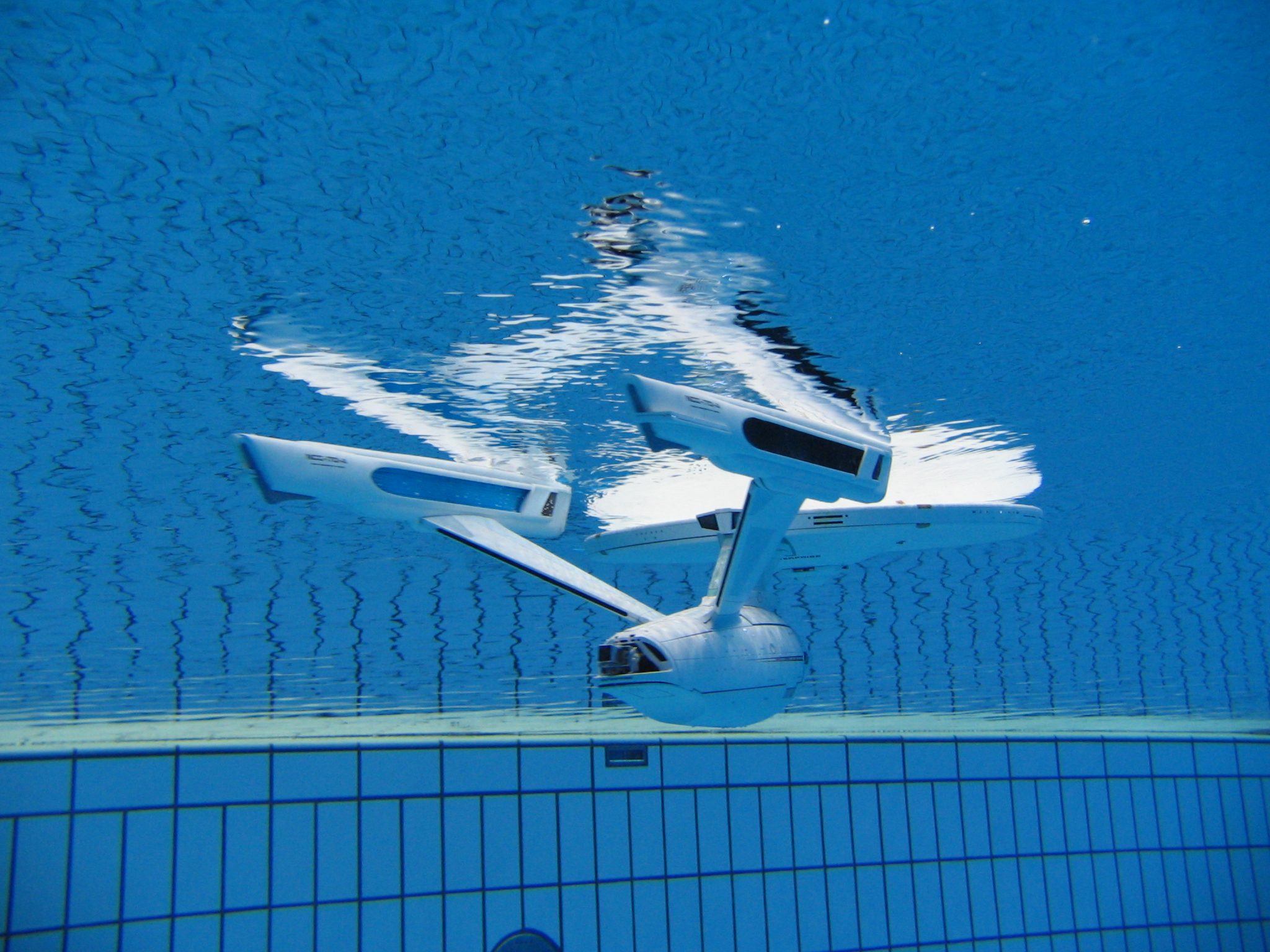
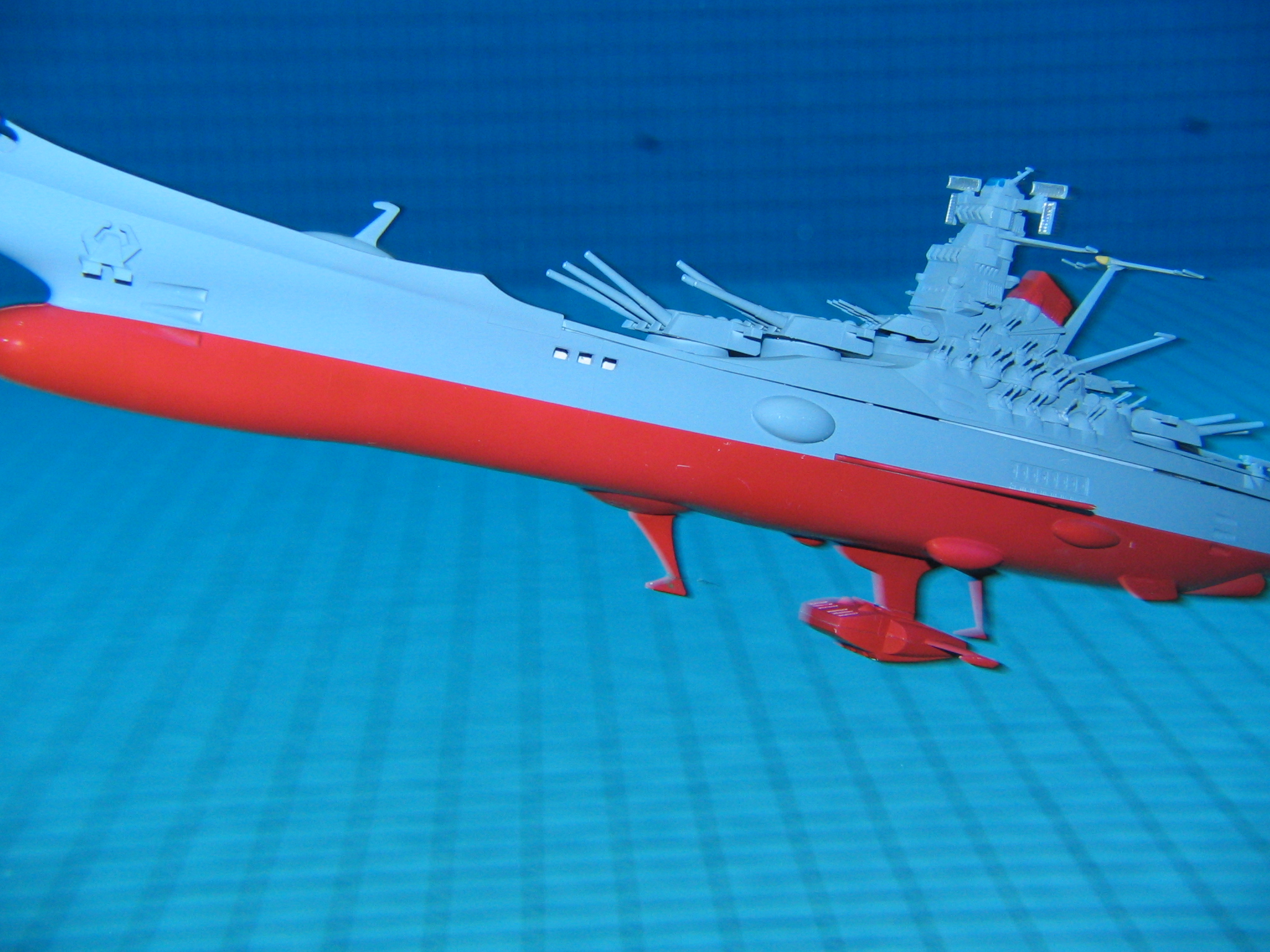
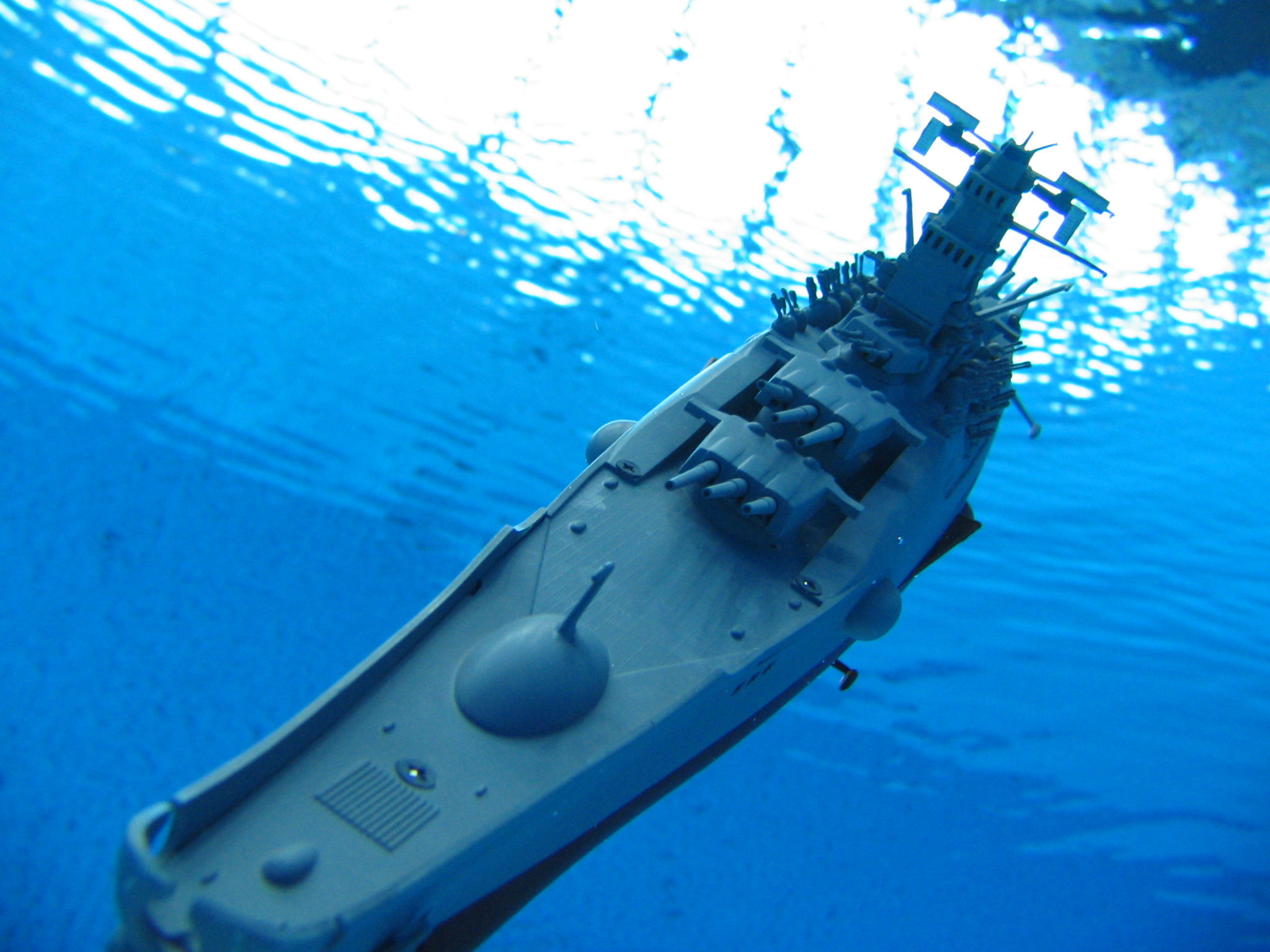
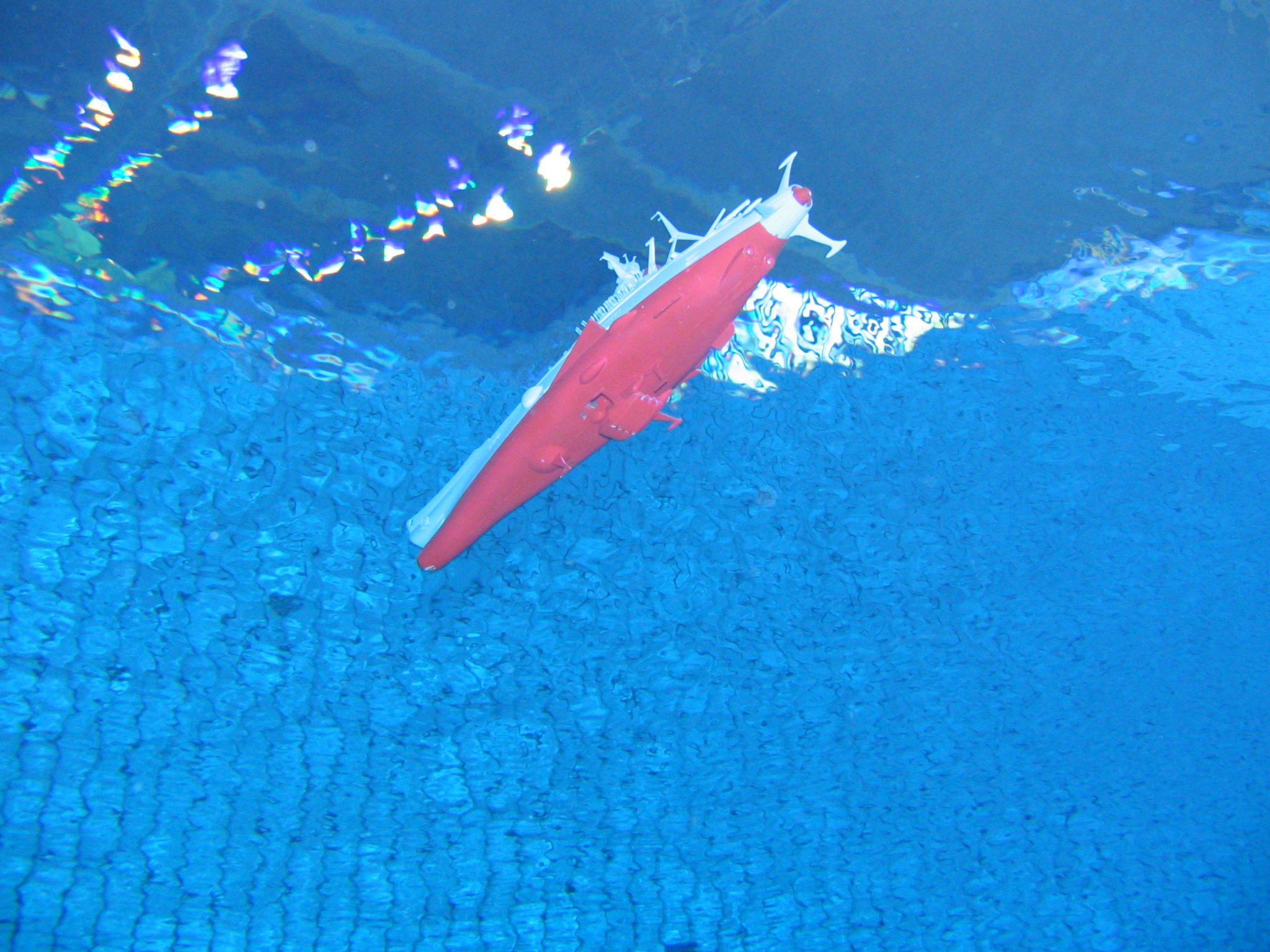
| D5p | 水中デモ | 無線(RC) | Y_D_Dock* | 「エンタープライズNCC-1701-A」:L:87cm×B:42cm、W=3.0kg。#61固定。スタートレック映画版に登場した宇宙船。ポンプジェット+3D推力偏向ノズルによるアクティブダイブ方式。レーザー2基装備 「ヴォイジャーNCC-74656」:L:52cm×B:22cm、W=1.0kg。#61固定。米TVドラマ、スタートレックTVシリーズのスタートレック・ヴォイジャーに登場した宇宙船。ポンプジェット+2D推力偏向ノズルによるダイナミカルダイブ方式。 「宇宙戦艦ヤマト」:L:52cm×B:10cm、W=0.9kg。#61固定。日本を代表するSF宇宙戦艦。ポンプジェット+3D推力偏向ノズルによるアクティブダイブ方式。) 「Super Delta Flyer」:L:50cm×B:22cm、W=1.3kg。#61/75交換可。平尾モデル製のレース用潜水艇) | NCC-1701-A:画像1/画像2/画像3/画像4/画像5/ヤマト:画像1/画像2/画像3 |
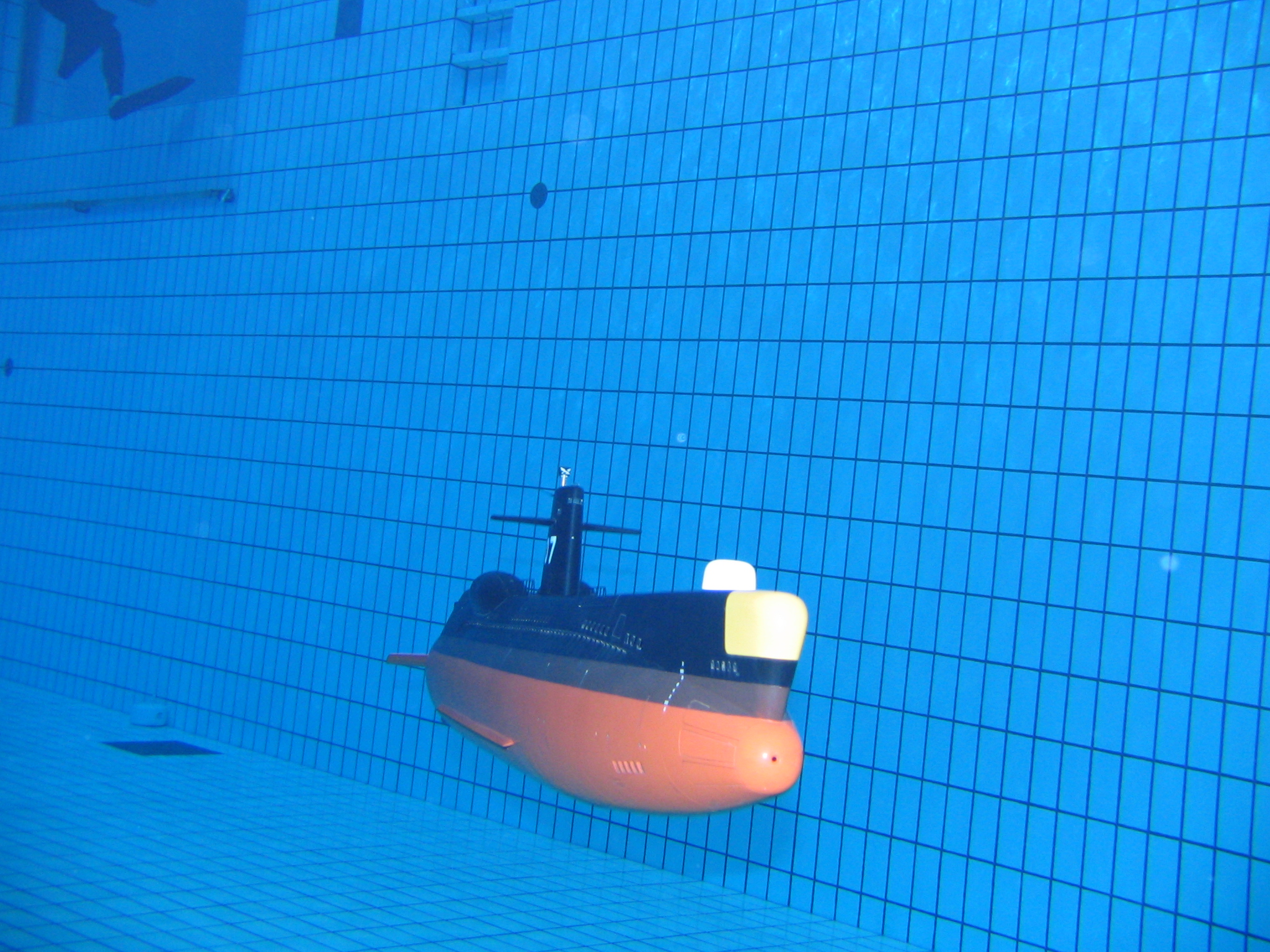
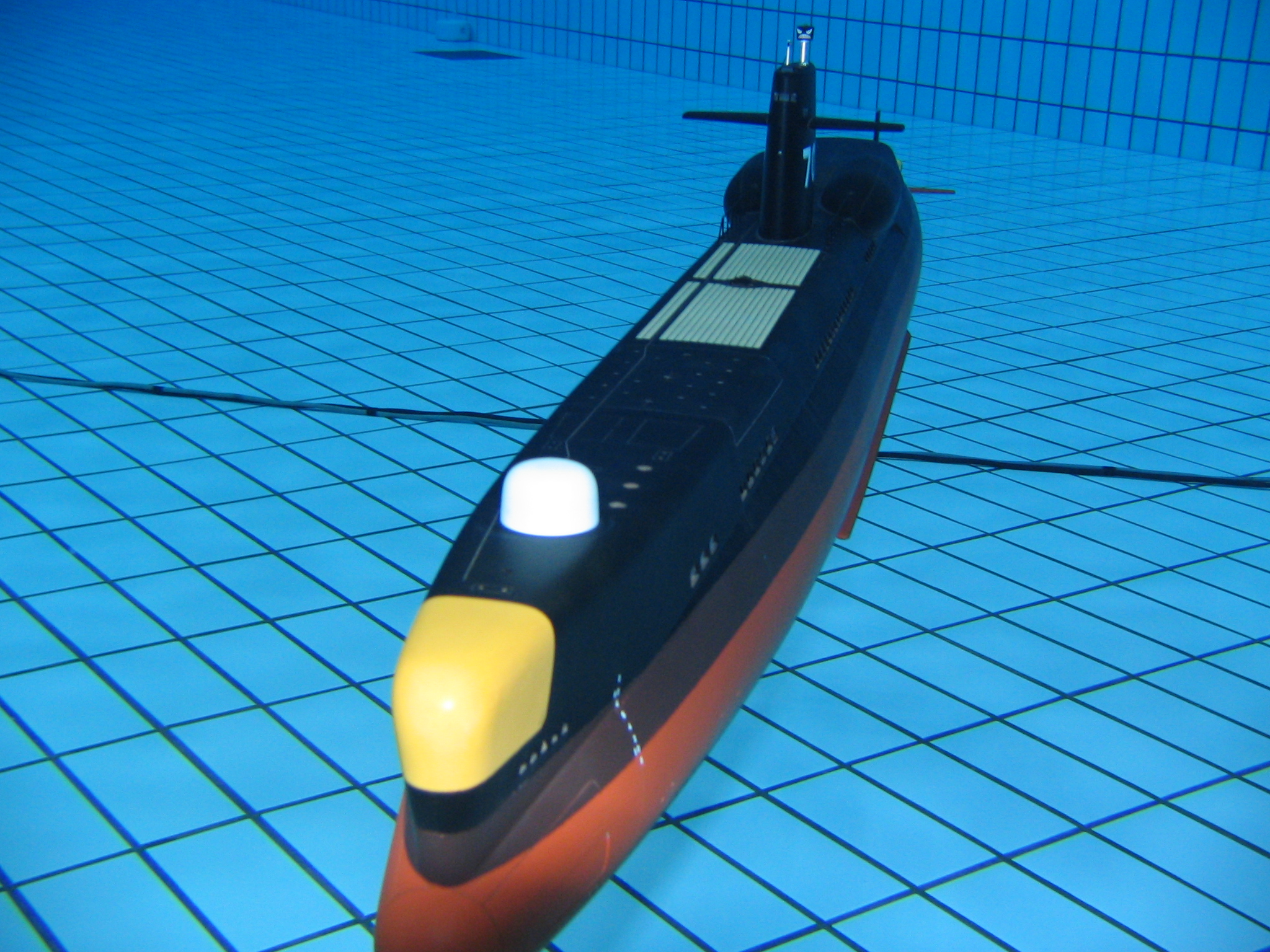
| D6p | 工作事例紹介・水中デモ | 無線(RC) | みずよん* | 「潜水Q」:L:15cm×B:25cm、W=500g。#10。2chで走行、潜水をするラジコン潜水艦です。本体が回転することで潜水します。構造が簡単なので工作例に。 (展示用)「おとひめ」(L:60cm×B:20cm、空中重量1000グラム、#75。3chのラジコン潜水艦。JAMSTECの「うらしま」に似せたカラーリングを施しています。走行性能は高くない) 「おきつしま」 | 画像/潜水Q:画像/avi動画/mov動画 |
| D6p | 水中デモ | 無線(RC) #61/63 | ミヨッピ* | 「Gyrinus-1」:L:48cm×B:6.0cm W=1,040g。ミズスマシの学名、オリジナル。水密部は汎用WTCを使用。ポンプジェットと偏向ノズルの組み合わせによるアクティブ姿勢制御。ノズル偏向板はサーボのミキシングにより動作制御。独立吸水管により更新機能および流入効率向上を狙った。 「素敵一号」:L:41.5cm×B:35.2cm、W=1,500g。水中の機動体としての自由度を追求するためのテストベッド機。同機にてテストされた機能や設計を別の機体に盛り込むのが目的。水中使用前提のCCDカメラの運用試験艇。今回は展示のみ) | Gyrinus:画像/wmv動画/素敵一号画像 |
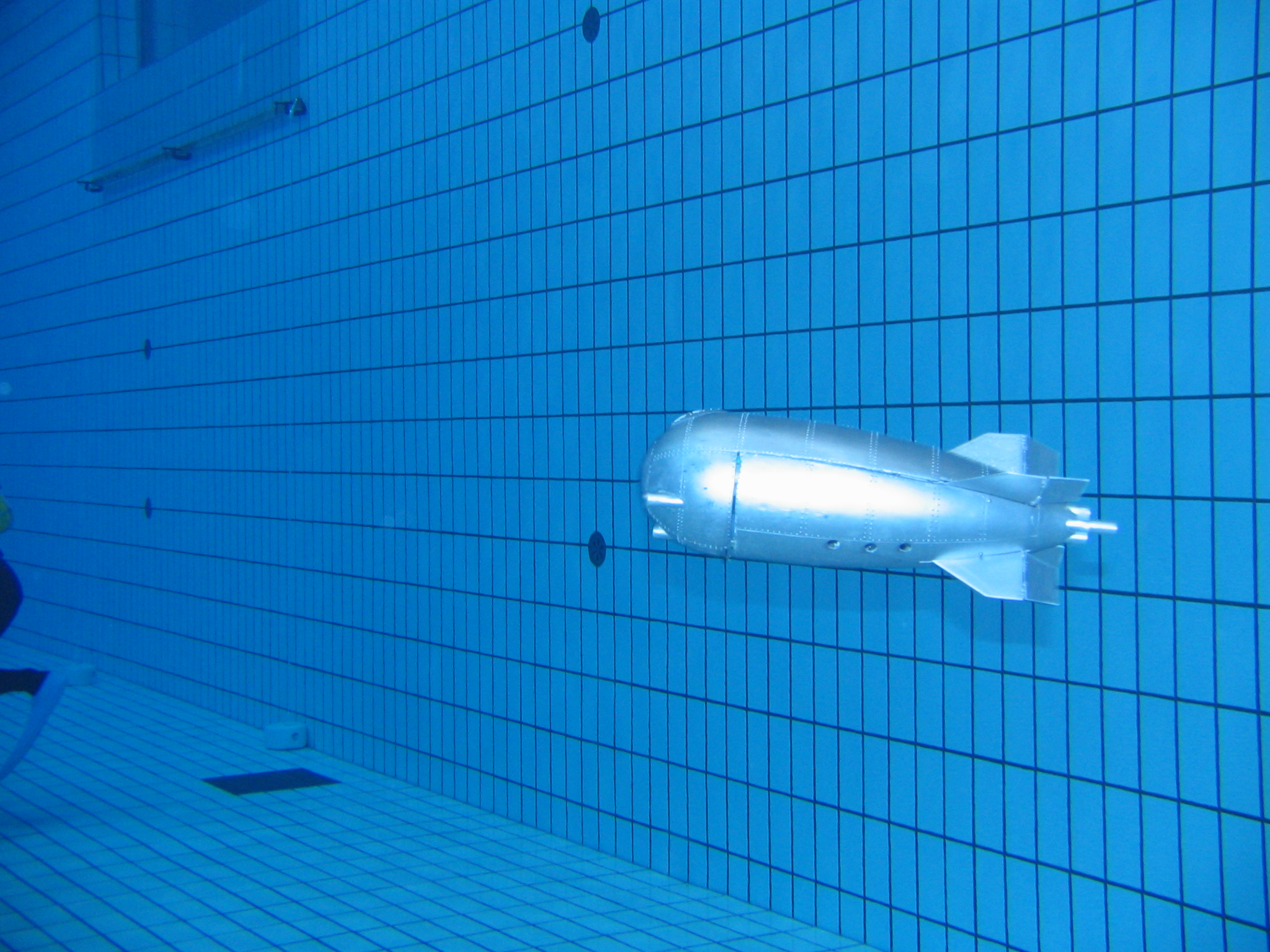
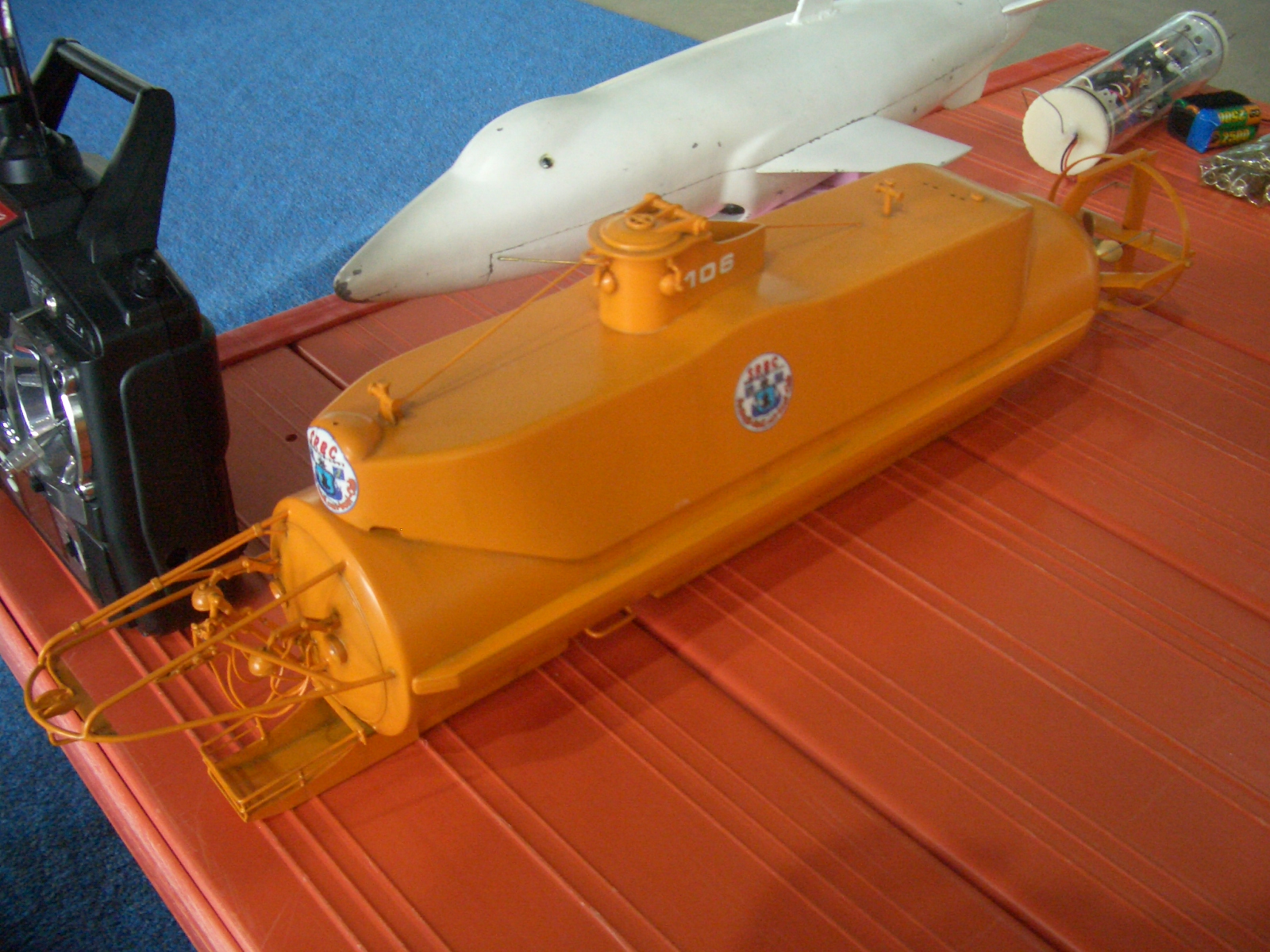
| D7p | 水中デモ・体験操縦 | 無線(RC) | 今江科学* | バチスカーフ「トリエステ号」:L:43cm×B:10cm、W=1200g, #67,69。1960年にマリアナ海溝チャレンジャー海淵で世界記録の10916mまで潜水したバチスカーフ トリエステ号の建造当時の姿を1/35スケールでラジコン化。潜航はギアポンプを使ったバラストタンク方式 水中デモ 5mプールの着底を目指します。 「コメット号」:L:40cm×B:12cm、W=940g, #67,69,73。SF作品「キャプテンフューチャー」に登場した涙滴型宇宙船をラジコン化。潜航方式はダイナミカルダイブ。エルロン装備でロールも可能 (展示)「ハバタキマンタモドキ」:L:65cm×B:50cm、W=640g。エイを模したヒレ推進のラジコンロボット。潜航方式はダイナミカルダイブ。 | コメット号:画像/動画/トリエステ:画像/avi動画/ハバタキマンタモドキ画像 |
| D8p | 水中デモ・体験操縦 | 無線(RC) | トム | 「アルファ級」、「はるしお改」、「ガトー級」、「デルタ潜水艇」、「シャーク」(アクアレーサー)、(体験操縦)「イルカもどき」、「おやしお型」(#75)、「よみうり号」(#65)、「モビー・ディック」(ロベ社キット「シーウルフ」、#67) | よみうり号/おやしお:画像/mov動画/アルファ級とロベ・シーウルフ/シャーク/ガトー級/デルタ潜水船:画像/動画 |
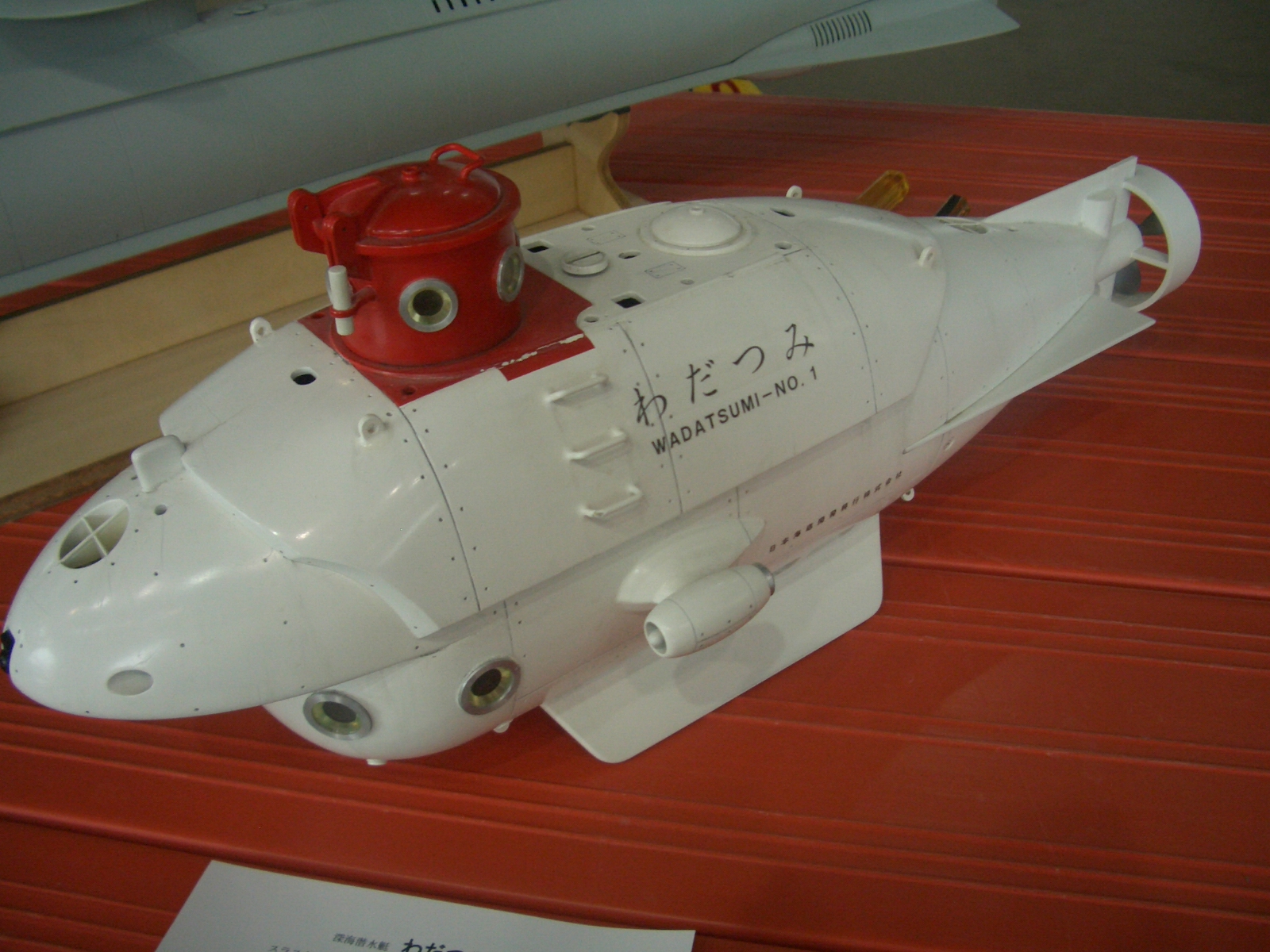
| D9p | 展示 | #65 | SOBU | 「シービュー号」(L:1.1m、B:22cm、W=4kg)、「わだつみ号」(L:55cm×B:18cm、W=3kg。73年映画版日本沈没より) | シービュー画像/わだつみ画像 |
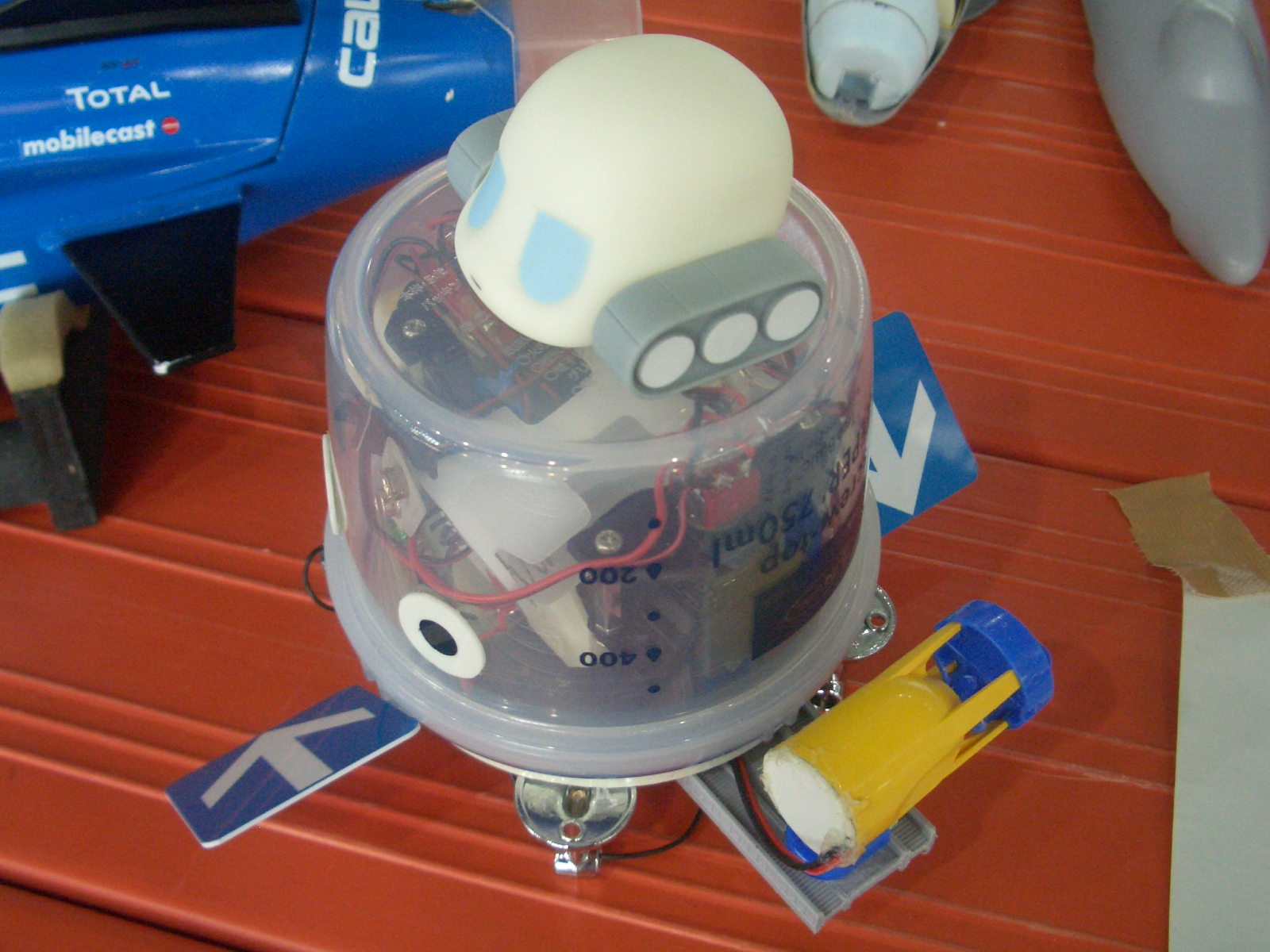
| D9p | 水中デモ | 無線(RC) | yoshi | 「SEA-WOLF」(トランペッターのプラモデル(実売2500円前後)にWTCを自作した人生初のRC潜水艦です。何もかもが始めてでしたのでトライ&エラーの繰り返しでした。) 「calsonic LARUS-001」、「calsonic LARUS-002」(カルソニックラルス ダブルオーワンとツー。「アクアモデラー」の中で話題の潜水艦レーサーです。設計コンセブトは水中での宙返り・ロール・インメルマンターンなど曲芸が出来るようにと考えて作りましたので、エレボン仕様 ラダーが最後部に設置してあります。作るからには完全オリジナルデザインでと思っていましたので、ジェット戦闘機F-22をデザインモチーフにしました。) みずよん級「こすも星丸」(設計コンセブトは「夏休みの宿題」。RC装置以外は100均一で部品を集めて作ってあります。船体を時計周りに回転させることにより潜行し逆周りで浮上します。) | SEA-WOLF/こすも星丸/calsonic |
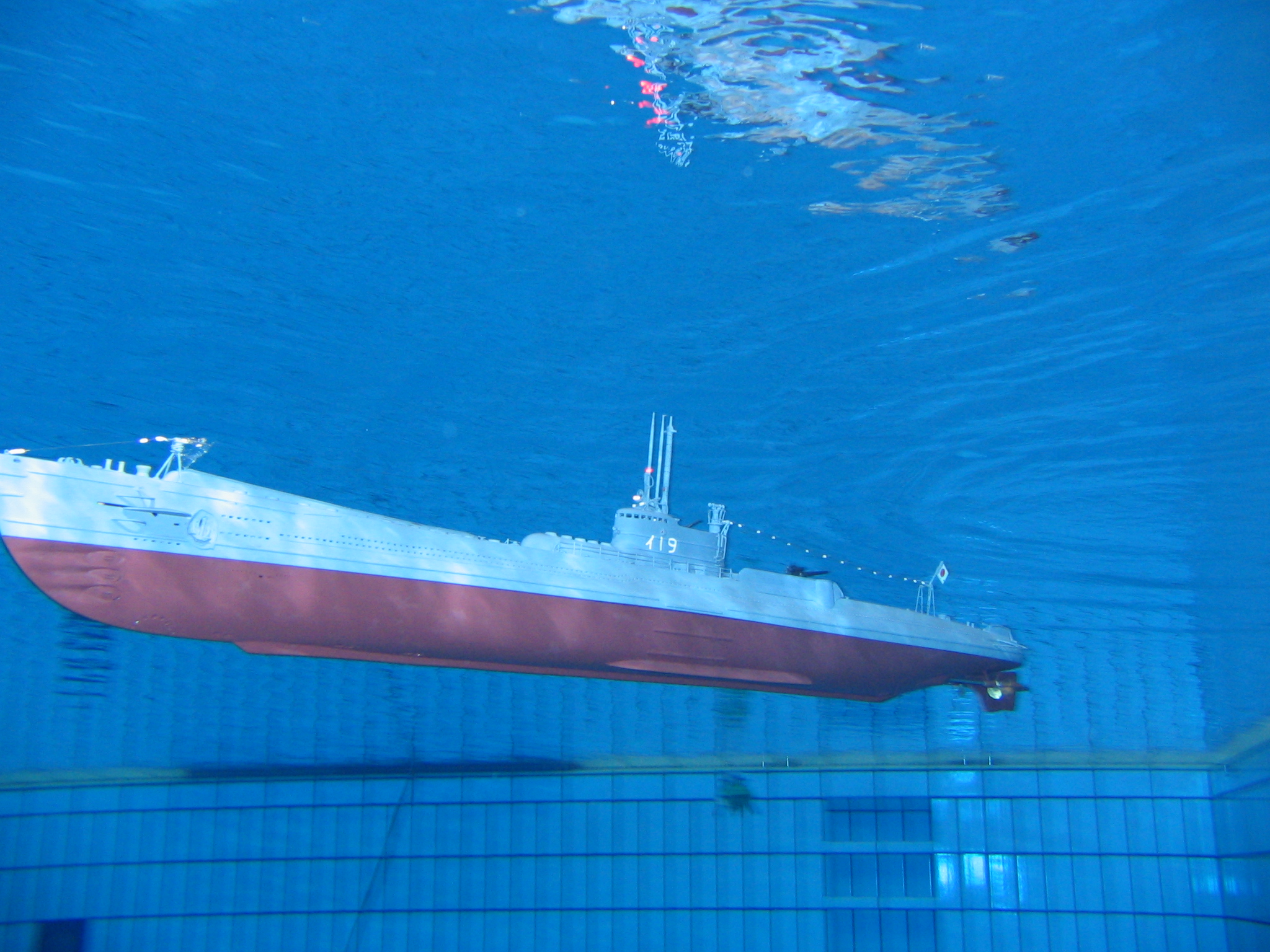
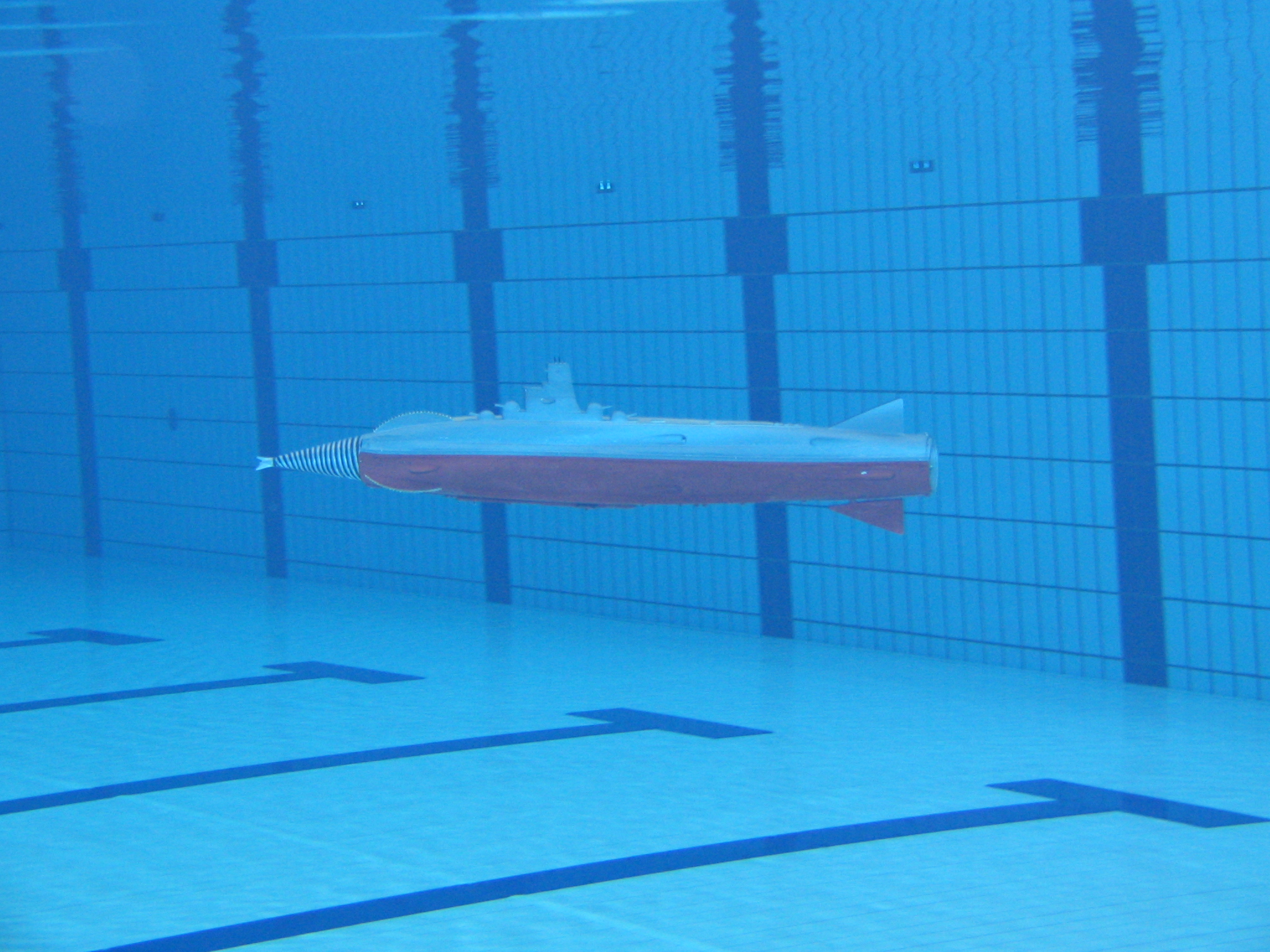
| D10p | 水中デモ | 無線(RC) #04 | Taka袋* | 日本海軍一等潜水艦乙型「イ-19号」(L:約1.4m×B:約20cm)、「サンダーバード4号」(L:約25cm×B:約10cm。水上走行艇)、小型潜航艦「ファースト1」(L:約30cm×B:約15cm)、(以下は予備)海底軍艦「轟天号」(L:約60cm×B:約10cm) | イ-19/ファースト-1/轟天号 |
| D11p | 水中デモ | 無線(RC) | 雲山* | 「sea-wolf」(L:93cm, #69,67。1/144のプラモデル改造)、(展示)「Uボート」 | 画像 |
| D11p | 水中デモ | 無線(RC) | 海人党 | 「はるしお」、アクアレーサーⅠ「7-ELEVEN」、1/144「キロ級改」 | 画像 |
| D11p | 水中デモ | 無線(RC) | シュウシュウ | 「アクアレーサーⅡ」(#63,67。L:50cm、W:約2kg)、「U-11」(#63,67。L:90cm、W:約9kg) | 画像 |
| D12p | 水中デモ | 無線(RC) | BDで通勤* | 「ジュニア707」(サブマリン707より), 「流星号」(スーパージェッターより)(共に#02)、(予備)「ホバーパイルダー」(マジンガーZより), 「ルカー」(海のトリトンより), 「サンダーバード4号」(#61):すべてプラモデルを改造した水中ラジコンです。 | TB4:画像1/画像2/流星号画像/ホバーパイルダー画像 |
| D12p | 展示 | 無線(RC) | ノーチラス3号 | 「デルフィン」:L:51.6cm×B:11.4cm、W=1.48kg。ロシアの初期潜水艇。 | 画像 |
| D13t | レスキュー・展示 | 無線(RC) | hiro | 「アクアレーサー」、「ガメラ」(展示のみ、40cm×10cm) | 画像 |
| D13t | レスキュー・展示 | 無線(RC) | せと際の魔術師 | キロ級 | |
| D13t | レスキュー・展示 | 無線(RC) | PUMPKIN | ギロン級 | |
| E9t | 体験操縦 年長向け | 無線(RC) | アクアモデラーズ ・ミーティング | ニッコー製「シーウルフ」、同改造「DSRV」、ニッコー(株)寄贈トイラジ潜水艦「Sub-168」2隻 | |
| E9t | 体験操縦 年少向け | 無線(RC) | 都立産業技術高校 黒木先生 | ミツワモデル製「深海潜水艇」2隻 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 (19MB)
(19MB)出店者(予定含む)